- Результирующее действие мышц в организме человека
- Лекция 5
- Результирующее действие мышц в организме человека
- 5.1. Понятие рычага
- 5.2. Звенья тела, как рычаги
- Рекомендуемая литература
- Агонисты, синергисты и антагонисты
- Агонисты, синергисты и антагонисты
- Определения
- Примеры мышц-антагонистов
- Верхние конечности
- Нижние конечности
- Примеры мышц-синергистов
- Верхние конечности
- Нижние конечности
- Примеры мышц-агонистов и антагонистов
- Особенности функционирования мышц-антагонистов
- Реципрокная иннервация
Результирующее действие мышц в организме человека
В пятой лекции по дисциплине «Биомеханика мышц» анализируется результирующее действие мышц в организме человека. Дается понятие рычага, видов рычагов. Приводятся примеры рычагов различного рода. Формулируется правило рычага.
Лекция 5
Результирующее действие мышц в организме человека
5.1. Понятие рычага
В естественных условиях скелетные мышцы действуют через костные рычаги, а рычаги представляют собой механизмы, известные еще со времен классической древности.
Рычаг – твердое тело, способное вращаться вокруг неподвижной опоры (оси вращения), на которое действуют, по крайней мере, две силы с противоположными моментами вращения.
Одну из них обычно называют движущей (в нашем случае – сила мышц), а другую – силой сопротивления (сила тяжести, вес груза). Использование рычага позволяет получить выигрыш в силе. Для расчета выигрыша в силе существует правило, открытое Архимедом в III веке до н. э. Это правило называется правилом рычага.
Для того чтобы уравновесить меньшей силой большую силу, необходимо, чтобы ее плечо превышало плечо большей силы. Выигрыш в силе, получаемый с помощью рычага, определяется отношением плеч приложенных сил, рис.5.1.
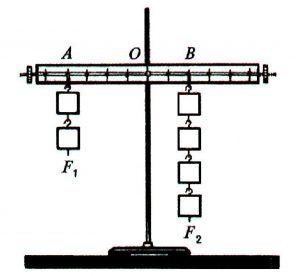 Рис. 5.1. Схема, иллюстрирующая правило рычага
Рис. 5.1. Схема, иллюстрирующая правило рычага
В 1687 году французский физик П. Вариньон придал этому правилу общий вид, применив понятие момента силы.
Моментом силы называется физическая величина, по модулю равная произведению силы на ее плечо: M=Fh, где: M – модуль момента силы, F– сила, h – плечо силы.
Плечо силы – перпендикуляр, опущенный из центра вращения на линию действия силы.
Правило моментов, сформулированное П. Вариньоном:
Рычаг находится в равновесии, если момент силы, вращающей его по часовой стрелке, равен моменту силы, вращающей его против часовой стрелки.
В механике различают два вида рычагов.
В рычаге первого рода действующие силы расположены по разные стороны от точки опоры. В механике существует закон, открытый в начале новой эры Героном Александрийским. Этот закон называют «золотым правилом» механики.
Выигрывая с помощью механизма в силе, мы во столько же раз проигрываем в пути и наоборот.
Выигрыш в силе означает, что прикладывается меньшая сила. Техническим механизмом, построенным по принципу рычага первого рода, являются ножницы. Ножницы для резки металла имеют длинные рукоятки и короткие лезвия (выигрыш в силе). Ножницы для резки бумаги имеют короткие рукоятки и длинные лезвия (выигрыш в пути). Конструкция весла, используемого в академической гребле, также дает выигрыш в пути (проводка весла) и проигрыш в силе, прикладываемой гребцом к веслу.
В рычаге второго рода действующие силы приложены по одну сторону от точки опоры. Техническим механизмом, реализующим этот рычаг, является тележка с грузом.
5.2. Звенья тела, как рычаги
Костные звенья, соединенные подвижно суставами, с позиции механики, представляют собой рычаги. Сустав при этом является точкой опоры рычага. Примерами рычагов первого рода у человека являются кости нижней конечности и антигравитационные мышцы, противодействующие силе тяжести. Так, сила тяжести Fтяж создает момент силы по одну сторону тазобедренного, коленного и голеностопного суставов, а сила тяги мышц Fм – по другую. Точками опоры рычагов являются тазобедренный, коленный и голеностопный суставы[1]. Человек сможет сохранять неподвижную позу, изображенную на рис 5.2, если момент силы тяжести, создаваемый вышерасположенными звеньями тела Fтяжhтяж будет уравновешен мышечным моментом, Fмhм т.е. будет иметь место равенство: Fтяжhтяж= Fмhм.
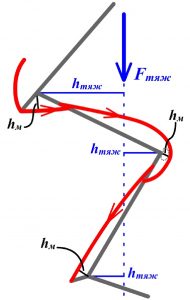 Рис.5.2. Пример рычагов первого рода
Рис.5.2. Пример рычагов первого рода
Чтобы противодействовать силе тяжести в антигравитационных мышцах человека, в течение длительного времени произошли следующие изменения: увеличился их физиологический поперечник, некоторые из них имеют перистую архитектуру. Кроме того, увеличились плечи силы тяги мышц за счет костных выступов (седалищный бугор и пяточный бугор), а также сесамовидных косточек (надколенник).
В рычаге второго рода действующие силы приложены по одну сторону от точки опоры. Примером рычага второго рода является предплечье с грузом (рис. 5.3.).

Рис.5.3. Пример рычага второго рода
Сила тяжести Fтяж и противодействующая ему сила мышечной тяги Fм приложены по одну сторону от точки опоры (локтевой сустав). Рычаг находится в равновесии, если выполняется то же условие, что и для рычага первого рода:. Fтяжhтяж= Fмhм.
Сила тяги мышцы, как правило, приложена на более коротком плече костного рычага. Поэтому, для уравновешивания рычага сила тяги мышцы должна быть во столько раз больше противодействующей силы, во сколько раз плечо ее силы тяги меньше плеча противодействующей силы. В связи с этим для костных рычагов почти всегда имеется проигрыш в силе, но выигрыш в пути и, как следствие – скорости перемещения внешнего груза («золотое правило» механики). Таким образом, биомеханизм характеризуется следующей особенностью: Имеется проигрыш в силе тяги мышц, но выигрыш в пути и в скорости перемещения груза или другого звена.
Рекомендуемая литература
1. Зациорский, В.М. Биомеханика двигательного аппарата человека / В.М. Зациорский, А.С. Аруин, В.Н. Селуянов.- М.: Физкультура и спорт, 1981.- 143 с.
2. Кичайкина, Н.Б. Биомеханика двигательных действий /Н.Б.Кичайкина, А.В.Самсонова : учебно-методическое пособие /Под ред Н.Б.Кичайкиной.- СПб: НГУ им. П.Ф.Лесгафта, 2014.- 183 с.
3. Попов, Г.И. Биомеханика двигательной деятельности: учеб. для студ. учреждений высш. проф. образования /Г.И.Попов, А.В. Самсонова.- М.: Издательский центр «Академия», 2011.- 320 с.
4. Самсонова, А.В. Биомеханика мышц: учебно-методическое пособие /А.В.Самсонова, Е.Н. Комиссарова / Под ред А.В.Самсоновой .- СПб., 2008.- 217 с.
[1] В отличие от технических механизмов, для костных механизмов приходится говорить не о точках опоры, а о «поверхности опоры».
Источник
Агонисты, синергисты и антагонисты
Даны определения мышц-агонистов, мышц-синергистов и мышц-антагонистов. Показано, что при выполнении движения мышцы в одной ситуации могут быть антагонистами, а в другой – синергистами. Наличие мышц-антагонистов необходимо для выполнения двигательных действий, так как мышца может лишь тянуть костное звено при сокращении, но не может его толкать.
Агонисты, синергисты и антагонисты
Давайте продолжим разговор о различных классификациях скелетных мышц и поговорим об антагонистах, синергистах и агонистах. Эти определения я взяла из прекрасной книги Раисы Самуиловны Персон «Мышцы-антагонисты в движениях человека».
Определения
Мышцами-антагонистами называют такие две мышцы (или две группы мышц) одного сустава, которые при сокращении осуществляют тягу в противоположные стороны.
Мышцами-синергистами называют мышцы одного сустава, которые тянут в одном и том же направлении.
Из двух мышц-антагонистов ту, которая осуществляет данное движение (то есть выполняет основную задачу), называют агонистом, а другую — антагонистом.
Примеры мышц-антагонистов
Верхние конечности
1. Сгибание предплечья осуществляет двуглавая мышца плеча (m.biceps brachii), а разгибание предплечья — трехглавая мышца плеча (m. triceps brachii). Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют тягу в противоположных направлениях относительно локтевого сустава. Одна мышца (двуглавая мышца плеча) отвечает за сгибание, а вторая (трехглавая мышца плеча) отвечает за разгибание.
2. Сгибание плеча (плечевой кости) осуществляют мышцы: дельтовидная (передние пучки), большая грудная мышца, клювовидно-плечевая, двуглавая мышца плеча. Разгибание плеча (плечевой кости) осуществляют мышцы-антагонисты: задняя часть дельтовидной, широчайшая мышца спины, подостная, малая круглая большая круглая, длинная головка трехглавой мышцы плеча.
Нижние конечности
3. Сгибание голени осуществляет среди прочих двуглавая мышца бедра (m. biceps femoris), а разгибание голени — четырехглавая мышца бедра (m.quadriceps femoris). Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют противоположную тягу относительно коленного сустава. Одна мышца (двуглавая мышца бедра) отвечает за сгибание, а вторая (четырехглавая мышца бедра) — отвечает за разгибание.
4. Сгибание стопы осуществляет трехглавая мышца голени (m. triceps surae) в состав которой входит икроножная мышца (m. gastrocnemius) и камбаловидная мышца (m. soleus). Разгибание стопы осуществляет передняя большеберцовая мышца (m. tibialis anterior). Эта мышца является антагонистом трехглавой мышце голени.
Примеры мышц-синергистов
Верхние конечности
1. Сгибание предплечья осуществляют мышцы: двуглавая мышца плеча, плечевая, плечелучевая. Это мышцы-синергисты, потому что это мышцы одного сустава, которые тянут в одном направлении (осуществляют сгибание предплечья).
Нижние конечности
2. Разгибание голени осуществляют четыре мышцы: латеральная широкая мышца бедра, медиальная широкая мышца бедра, промежуточная широкая мышца бедра, прямая мышца бедра. Это четыре головки четырехглавой мышцы бедра. Это мышцы-синергисты, так как они тянут в одном направлении (осуществляют разгибание голени).
3. Сгибание голени осуществляют мышцы: двуглавая мышца бедра, полусухожильная, полуперепончатая, портняжная, тонкая, подколенная, икроножная, подошвенная. Это мышцы-синергисты, так как они тянут в одном направлении (осуществляют сгибание голени).
4. Подошвенное сгибание стопы осуществляют: трехглавая мышца голени (икроножная и камбаловидная), подошвенная мышца, задняя большеберцовая, длинный сгибатель большого пальца, длинный сгибатель пальцев, длинная малоберцовая, короткая малоберцовая. Это мышцы-синергисты, так как они тянут в одном направлении (сгибают стопу).
Примеры мышц-агонистов и антагонистов
1.Сгибание предплечья осуществляет двуглавая мышца плеча (m.biceps brachii), а разгибание предплечья — трехглавая мышца плеча (m. triceps brachii). Если мы рассматриваем сгибание предплечья как основное движение, то мышцей-агонистом будет двуглавая мышца плеча (она осуществляет данное движение), а мышцей-антагонистом — трехглавая мышца плеча. Она отвечает за разгибание. Следует, однако, заметить, что мышц-агонистов может быть много. Мышцы-агонисты в данном случае — это все мышцы, которые отвечают за сгибание предплечья. Это мышцы: двуглавая мышца плеча, плечевая, плечелучевая. Эти мышцы с одной стороны, являются мышцами-синергистами (отвечают за одну и ту же функцию) и агонистами (отвечают за основное движение).
2. Рассматриваем разгибание голени. Мышцей-агонистом будет четырехглавая мышца бедра (она осуществляет данное движение). А мышцами-антагонистами будут мышцы сгибатели бедра: двуглавая мышца бедра, полусухожильная, полуперепончатая, портняжная, тонкая, подколенная, икроножная и подошвенная.
Особенности функционирования мышц-антагонистов
1. Наличие мышц-антагонистов необходимо, так как мышца может лишь тянуть кость, но не может ее толкать. Поэтому, чтобы костное звено выполняло, например, сгибание и разгибание, необходимо наличие двух мышц. Одна из мышц будет отвечать за сгибание в суставе, а другая – за разгибание.
2. При выполнении двигательных действий мышцы-антагонисты не обязательно работают попеременно. Еще в начале ХХ века немецкий ученый R. Wagner (1925) показал, что в зависимости от условий внешнего силового поля меняется соотношение фаз активности мышц-антагонистов. Полное совпадение активности мышц с перемещением наблюдается только при движениях против сил трения. При работе против сил инерции мышца-агонист активна только на протяжении первой фазы движения. Затем оно продолжается по инерции при возрастающей активности мышцы-антагониста, которая тормозит движение (рис.1).
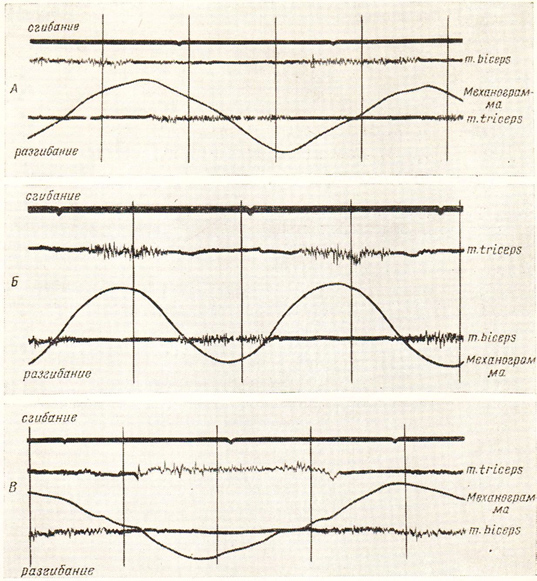
Рис.1. Работа мышц-антагонистов против внешних сил разной природы: А-силы трения; Б — силы инерции; В — силы упругости (R.Wagner, 1925)
3. На активность мышц-антагонистов сильно влияет темп движений. При выполнении движения в медленном темпе активность мышц-антагонистов соответствует фазам движения, за которые они отвечают. А именно: при сгибании активность проявляют мышцы, отвечающие за сгибание, а при разгибании активность проявляют разгибатели. Увеличение темпа движения приводит к тому, что при в конце фазы сгибания может активироваться мышца-разгибатель. В данном случае мышца-разгибатель (антагонист) действует как тормоз. При быстрых движениях также существуют фазы одновременной активности мышц-антагонистов (А.В. Самсонова, 1998).
3. При выполнении движения мышцы в одной ситуации могут быть антагонистами, а в другой – синергистами. Например, двуглавая мышца плеча является синергистом мышцы круглый пронатор при сгибании предплечья. А при ротации предплечья они работают как антагонисты, так как двуглавая осуществляет супинацию предплечья, а круглый пронатор – пронацию.
Реципрокная иннервация
Для того, чтобы мышца-агонист могла выполнять свою задачу, мышца-антагонист должна быть расслаблена. На эту особенность обратил внимание еще Рене Декарт в 17 веке при анализе движений глаз. Затем исследования работы мышц-антагонистов были продолжены. Было установлено, что существует механизм, который управляет работой мышц-антагонистов в центральной нервной системе. Это механизм получил название реципрокной иннервации. Большой вклад в изучение этого механизма внес лауреат Нобелевской премии Чарльз Скот Шеррингтон (рис.2). Было установлено, что при возбуждении мышцы-агониста, ЦНС тормозит работу мышцу-антагониста (рис.3).

Рис.2. Шеррингтон Ч.С.
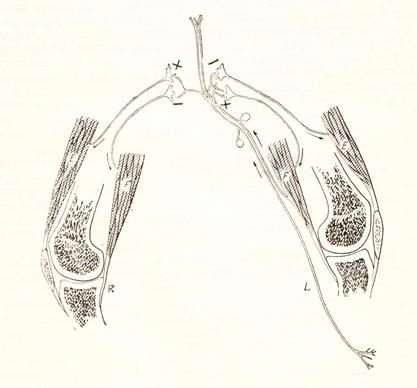
Рис.3. Схема реципрокной иннервации мышц-антагонистов (Шеррингтон Ч.С., 1969) При поступлении двигательного импульса на мышцу (показано знаком «+») мышца-антагонист тормозится (показано знаком «-«)
Источник


