- Тангенциальное, или касательное ускорение
- Кинематические величины
- Траектория движения и ускорение
- Определение тангенциального ускорения
- Получение уравнения касательного ускорения
- Тангенциальное ускорение и модуль полного ускорения
- Связь касательного и углового ускорения
- Определение тангенциального ускорения по известной функции скорости
- Задача на определение тангенциального ускорения
- Тангенциальная составляющая ускорения 1 страница
Тангенциальное, или касательное ускорение
Все тела, которые окружают нас, находятся в постоянном движении. Перемещение в пространстве тел наблюдается на всех масштабных уровнях, начиная с движения элементарных частиц в атомах вещества и заканчивая ускоренным движением галактик во Вселенной. В любом случае процесс движения происходит с ускорением. В данной статье рассмотрим подробно понятие касательного ускорения и приведем формулу, по которой его можно рассчитать.
Кинематические величины

Прежде чем вести разговор о касательном ускорении, рассмотрим, какими величинами принято характеризовать произвольное механическое перемещение тел в пространстве.
 Вам будет интересно: Как научить ребенка делению: основные принципы, простые способы решения и советы учителей
Вам будет интересно: Как научить ребенка делению: основные принципы, простые способы решения и советы учителей
В первую очередь — это путь L. Он показывает, какое расстояние в метрах, сантиметрах, километрах и так далее прошло тело за некоторый промежуток времени.
Вторая важная характеристика в кинематике — это скорость тела. В отличие от пути, она является величиной векторной и направлена вдоль траектории движения тела. Скорость определяет быстроту изменения пространственных координат во времени. Формула для ее вычисления имеет вид:
 Вам будет интересно: Как сдать досрочный ЕГЭ?
Вам будет интересно: Как сдать досрочный ЕГЭ?
Скорость — это по времени производная пути.
Наконец, третьей важной характеристикой движения тел является ускорение. Согласно определению в физике, ускорение — это величина, которая определяет изменение скорости от времени. Формулу для него можно записать в виде:
Ускорение, как и скорость, тоже является величиной векторной, однако в отличие от нее оно направлено в сторону изменения скорости. Направление ускорения также совпадает с вектором результирующей силы, оказывающей действие на тело.
Траектория движения и ускорение

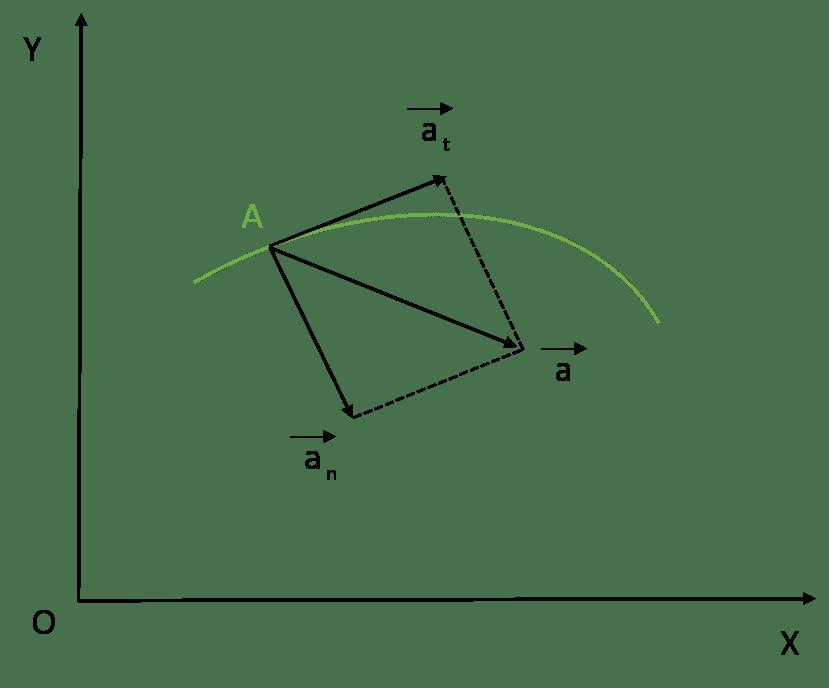
Многие задачи в физике рассматривают в рамках прямолинейного движения. В этом случае, как правило, не говорят о касательном ускорении точки, а работают с линейным ускорением. Однако если перемещение тела не является линейным, то полное его ускорение может быть разложено на две составляющие:
В случае линейного движения нормальная составляющая равна нулю, поэтому о векторном разложении ускорения не говорят.
 Вам будет интересно: Малоизвестные и интересные факты о золоте
Вам будет интересно: Малоизвестные и интересные факты о золоте
Таким образом, траектория движения во многом определяет характер и составные части полного ускорения. Под траекторией движения понимают воображаемую линию в пространстве, вдоль которой тело перемещается. Любая криволинейная траектория приводит к появлению ненулевых компонент ускорения, отмеченных выше.
Определение тангенциального ускорения
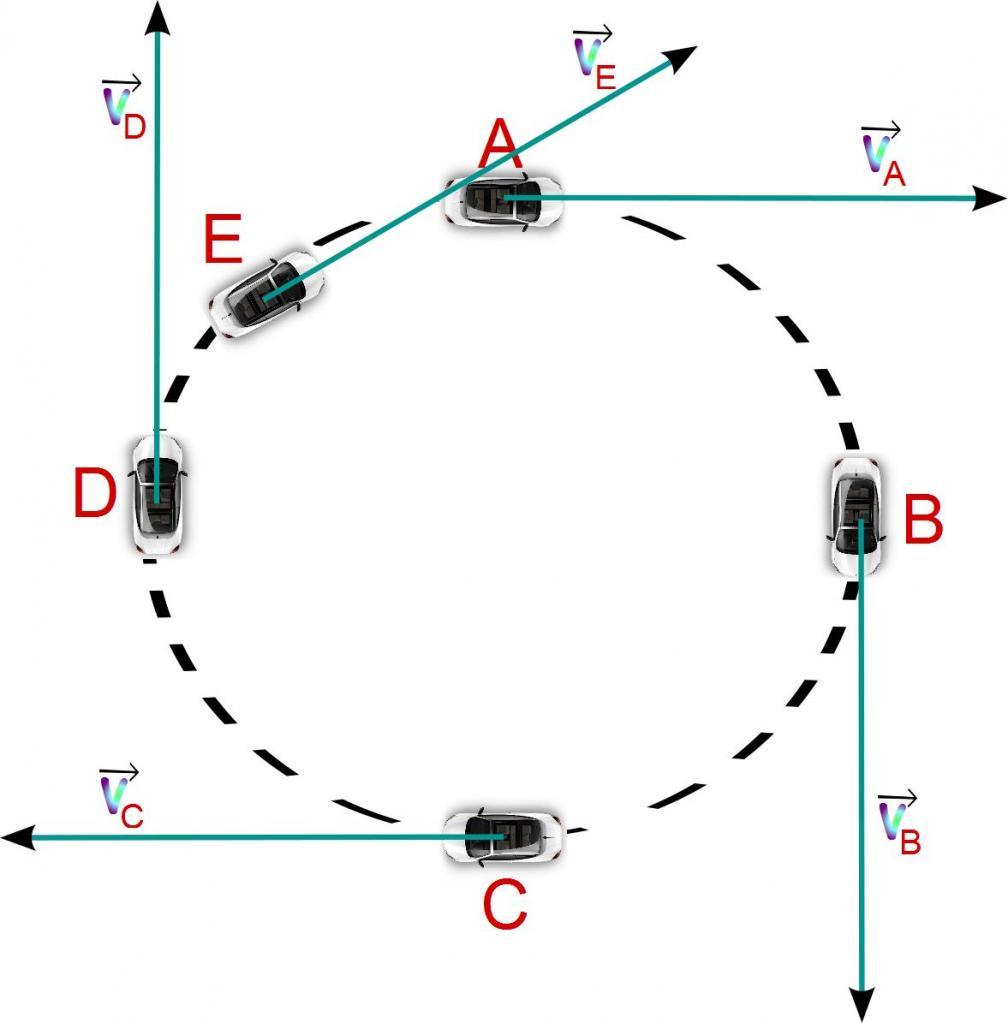
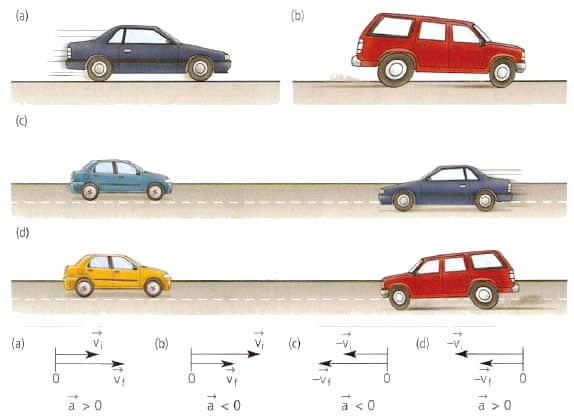
Тангенциальное или, как его еще называют, касательное ускорение — это компонента полного ускорения, которая направлена по касательной к траектории движения. Поскольку вдоль траектории направлена также скорость, то вектор тангенциального ускорения совпадает с вектором скорости.
Выше было дано понятие ускорения как меры изменения скорости. Поскольку скорость — это вектор, то изменить ее можно либо по модулю, либо по направлению. Касательное ускорение определяет только изменение модуля скорости.
Заметим, что в случае прямолинейного движения вектор скорости своего направления не меняет, поэтому, в соответствии с приведенным определением, тангенциальное ускорение и линейное ускорение — это одна и та же величина.
Получение уравнения касательного ускорения
Предположим, что тело движется по некоторой кривой траектории. Тогда его скорость v¯ в выбранной точке можно представить в следующем виде:
Здесь v — модуль вектора v¯, ut¯ — единичный вектор скорости, направленный по касательной к траектории.
Используя математическое определение ускорения, получаем:
a¯ = dv¯/dt = d(v*ut¯)/dt = dv/dt*ut¯ + v*d(ut¯)/dt
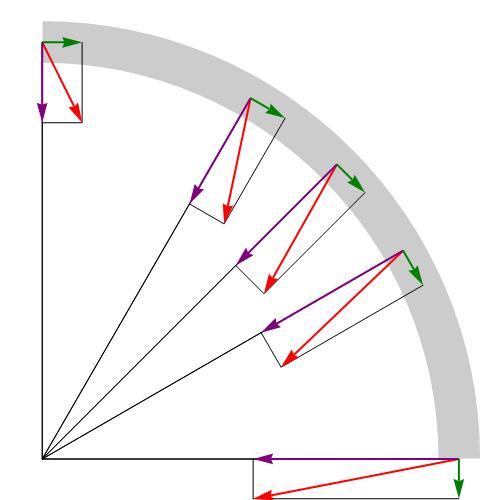
При нахождении производной здесь использовалось свойство произведения двух функций. Мы видим, что полное ускорение a¯ в рассматриваемой точке соответствует сумме двух слагаемых. Они являются касательным и нормальным ускорением точки соответственно.
Скажем пару слов о нормальном ускорении. Оно ответственно за изменение вектора скорости, то есть за изменение направления движения тела вдоль кривой. Если явно вычислить значение второго слагаемого, то получится формула для нормального ускорения:
an = v*d(ut¯)/dt = v2/r
Нормальное ускорение направлено вдоль нормали, восстановленной в данную точку кривой. В случае движения по окружности нормальное ускорение является центростремительным.
Уравнение касательного ускорения at¯ имеет вид:
Это выражение говорит о том, что тангенциальное ускорение соответствует изменению не направления, а модуля скорости v¯ за момент времени. Поскольку тангенциальное ускорение направлено по касательной к рассматриваемой точки траектории, то оно всегда перпендикулярно нормальной компоненте.
Тангенциальное ускорение и модуль полного ускорения
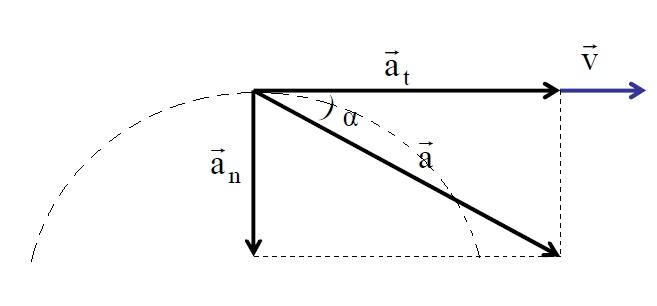
Выше была представлена вся информация, которая позволяет вычислить полное ускорение через касательное и нормальное. Действительно, так как обе компоненты являются взаимно перпендикулярными, то их вектора образуют катеты прямоугольного треугольника, гипотенузой которого является вектор полного ускорения. Этот факт позволяет записать формулу для модуля полного ускорения в следующем виде:
Угол θ между полным ускорением и тангенциальным можно определить так:
Чем больше тангенциальное ускорение, тем ближе оказываются направления касательного и полного ускорения.
Связь касательного и углового ускорения

Типичной криволинейной траекторией, по которой движутся тела в технике и природе, является окружность. Действительно, перемещение шестерен, лопастей и планет вокруг собственной оси или вокруг своих светил происходит именно по окружности. Движение, соответствующее этой траектории, называется вращением.
Кинематика вращения характеризуется теми же величинами, что кинематика движения по прямой, однако, они имеют угловой характер. Так, для описания вращения используют центральный угол поворота θ, угловые скорость ω и ускорение α. Для этих величин справедливы следующие формулы:
Предположим, что тело совершило один оборот вокруг оси вращения за время t, тогда для скорости угловой можно записать:
Линейная скорость в этом случае будет равна:
Где r — радиус траектории. Последние два выражения позволяют записать формулу связи двух скоростей:
Теперь вычислим производную по времени от левой и правой частей равенства, получим:
В правой части равенства стоит произведение углового ускорения на радиус окружности. Левая же часть равенства — это изменение модуля скорости, то есть касательное ускорение.
Таким образом, тангенциальное ускорение и аналогичная угловая величина связаны равенством:
Если предположить, что вращается диск, то тангенциальное ускорение точки при постоянной величине α будет возрастать линейно с увеличением расстояния от этой точки до оси вращения r.
Далее, решим две задачи на применение записанных выше формул.
Определение тангенциального ускорения по известной функции скорости
Известно, что скорость тела, которое перемещается по некоторой кривой траектории, описывается следующей функцией от времени:
Необходимо определить формулу касательного ускорения и найти его значение в момент времени t = 5 секунд.
Сначала запишем формулу для модуля тангенциального ускорения:
То есть для вычисления функции at(t) следует определить производную скорости по времени. Имеем:
at = d(2*t2 + 3*t + 5)/dt = 4*t + 3
Подставляя в полученное выражение время t = 5 секунд, приходим к ответу: at = 23 м/с2.
Заметим, что графиком скорости от времени в данной задаче является парабола, график же тангенциального ускорения — это прямая линия.
Задача на определение тангенциального ускорения
Известно, что материальная точка начала равноускоренное вращение с нулевого момента времени. Через 10 секунд после начала вращения ее центростремительное ускорение стало равным 20 м/с2. Необходимо определить касательное ускорение точки через 10 секунд, если известно, что радиус вращения равен 1 метр.
Сначала запишем формулу для центростремительного или нормального ускорения ac:
Пользуясь формулой связи между линейной и угловой скоростью, получим:
При равноускоренном движении скорость с угловым ускорением связаны формулой:
Подставляя ω в равенство для ac, получим:
Линейное ускорение через тангенциальное выражается так:
Подставляем последнее равенство в предпоследнее, получаем:
ac = at2/r2*t2*r = at2/r*t2 =>
Последняя формула с учетом данных из условия задачи приводит к ответу: at = 0,447 м/с2.
Источник
Тангенциальная составляющая ускорения 1 страница
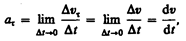
т. е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Найдем вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому Ds можно считать дугой окружности некоторого радиуса r, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и EAD следует Dvn/AB = v1/r, но так как AB = vDt, то

В пределе при  получим
получим  .
.
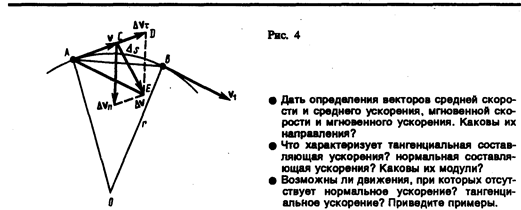
Поскольку , угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между v и Dvn стремится к прямому. Следовательно, при векторы Dvn и v оказываются взаимно перпендикулярными. Tax как вектор скорости направлен по касательной к траектории, то вектор Dvn, перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
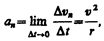
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют также центростремительным ускорением).
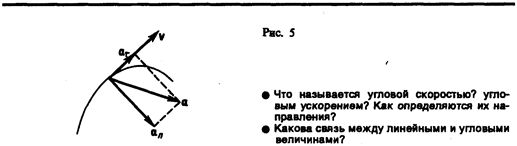
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис.5):

Итак, тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения — быстроту изменения скорости по направлению (направлена к центру кривизны траектории).
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1)  , аn = 0 — прямолинейное равномерное движение;
, аn = 0 — прямолинейное равномерное движение;
2)  , аn = 0 — прямолинейное равнопеременное движение. При таком виде движения
, аn = 0 — прямолинейное равнопеременное движение. При таком виде движения
Если начальный момент времени t1=0, а начальная скорость v1=v0, то, обозначив t2=t и v2=v, получим  , откуда
, откуда

Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t, найдем, что длина пути, пройденного точкой, в случае равнопеременного движения
3)  , аn = 0— прямолинейное движение с переменным ускорением;
, аn = 0— прямолинейное движение с переменным ускорением;
4) , аn = const. При скорость по модулю не изменяется, а изменяется по направлению. Из формулы an=v 2 /r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;
5) ,  — равномерное криволинейное движение;
— равномерное криволинейное движение;
6)  , — криволинейное равнопеременное движение;
, — криволинейное равнопеременное движение;
7) , — криволинейное движение с переменным ускорением.
§ 4. Угловая скорость и угловое ускорение
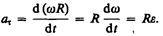
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис. 6). Ее положение через промежуток времени Dt зададим углом D  . Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются
. Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются  или
или  ). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняетсяправилу правого винта(рис.6). Векторы, направления которых связываются с направлением вращения, называютсяпсевдовекторами илиаксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
). Модуль вектора равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняетсяправилу правого винта(рис.6). Векторы, направления которых связываются с направлением вращения, называютсяпсевдовекторами илиаксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
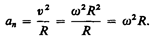
Вектор  направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w=T – 1 , а ее единица — радиан в секунду (рад/с).
направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор (рис.7). Размерность угловой скорости dim w=T – 1 , а ее единица — радиан в секунду (рад/с).
Линейная скорость точки (см. рис. 6)


В векторном виде формулу для линейной скорости можно написать как векторное произведение:

При этом модуль векторного произведения, по определению, равен  , а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
, а направление совпадает с направлением поступательного движения правого винта при его вращении от к R.
Если (  = const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует
= const, то вращение равномерное и его можно характеризовать периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует  = 2p, то = 2p/T, откуда
= 2p, то = 2p/T, откуда

Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:


Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

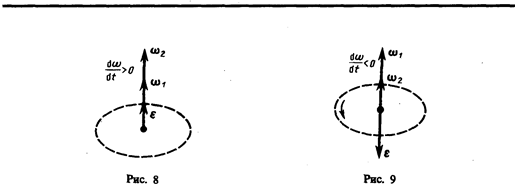
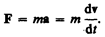
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор  сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
сонаправлен вектору (рис.8), при замедленном — противонаправлен ему (рис.9).
Тангенциальная составляющая ускорения 
Нормальная составляющая ускорения
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение  , нормальное ускорение
, нормальное ускорение  ) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:
) и угловыми величинами (угол поворота j, угловая скорость w, угловое ускорение e) выражается следующими формулами:

В случае равнопеременного движения точки по окружности (e=const)

где w0 — начальная угловая скорость.
Задачи
1.1. Зависимость пройденного телом пути от времени задается уравнением s=A+Bt+Ct 2 +Dt 3 (С=0,1 м/с 2 , D=0,03 м/с 3 ). Определить: 1) время после начала движения, через которое ускорение а тела будет равно 2 м/с 2 ; 2) среднее ускорение áаñ тела за этот промежуток времени. [1) 10 с; 2) 1,1 м/с 2 ]
1.2. Пренебрегая сопротивлением воздуха, определить угол, под которым тело брошено к горизонту, если максимальная высота подъема тела равна 1/4 дальности его полета. [45°]
1.3. Колесо радиусом R=0,1 м вращается так, что зависимость угловой скорости от времени задается уравнением w = 2At + 5Bt 4 (A = 2 рад/с 2 и B = 1 рад/с 5 ). Определить полное ускорение точек обода колеса через t=1 с после начала вращения и число оборотов, сделанных колесом за это время. [а=8,5 м/с 2 ; N=0,48]
1.4. Нормальное ускорение точки, движущейся по окружности радиусом r=4 м, задается уравнением an=A+Bt+Ct 2 (А=1 м/с 2 , B=6 м/с 3 , С=3 м/с 4 ). Определить: 1) тангенциальное ускорение точки; 2) путь, пройденный точкой за время t1= 5 с после начала движения; 3) полное ускорение для момента времени t2=1 с. [1) 6 м/с 2 ; 2) 85 м; 3) 6,32 м/с 2 ]
1.5. Частота вращения колеса при равнозамедленном движении за t=1 мин уменьшилась от 300 до 180 мин –1 . Определить: 1) угловое ускорение колеса; 2) число полных оборотов, сделанных колесом за это время. [1) 0,21 рад/с 2 ; 2) 240]
1.6. Диск радиусом R=10 см вращается вокруг неподвижной оси так, что зависимость угла поворота радиуса диска от времени задается уравнением j=A+Bt+Ct 2 +Dt 3 (B=1 рад/с, С=1 рад/с 2 , D=1 рад/с 3 ). Определить для точек на ободе колеса к концу второй секунды после начала движения: 1) тангенциальное ускорение ; 2) нормальное ускорение аn; 3) полное ускорение а. [1) 1,4 м/с 2 ; 2) 28,9 м/с 2 ; 3) 28,9 м/с 2 ]
Глава 2 Динамика материальной точки и поступательного движения твердого тела
§ 5. Первый закон Ньютона. Масса. Сила
Динамика является основным разделом механики, в ее основе лежат три закона Ньютона, сформулированные им в 1687 г. Законы Ньютона играют исключительную роль в механике и являются (как и все физические законы) обобщением результатов огромного человеческого опыта. Их рассматривают как систему взаимосвязанных законов и опытной проверке подвергают не каждый отдельный закон, а всю систему в целом.
Первый закон Ньютона: всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние. Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции.
Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета. Инерциальной системой отсчета является такая система отсчета, относительно которой материальная точка, свободная от внешних воздействий, либо покоится, либо движется равномерно и прямолинейно. Первый закон Ньютона утверждает существование инерциальных систем отсчета.
Опытным путем установлено, что инерциальной можно считать гелиоцентрическую (звездную) систему отсчета (начало координат находится в центре Солнца, а оси проведаны в направлении определенных звезд). Система отсчета, связанная с Землей, строго говоря, неинерциальна, однако эффекты, обусловленные ее неинерциальностью (Земля вращается вокруг собственной оси и вокруг Солнца), при решении многих задач пренебрежимо малы, и в этих случаях ее можно считать инерциальной.
Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, т.е., иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы).
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные (инертная масса) и гравитационные (гравитационная масса) свойства. В настоящее время можно считать доказанным, что инертная и гравитационная массы равны друг другу (с точностью, не меньшей 10 –12 их значения).
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы. Под действием сил тела либо изменяют скорость движения, т. е. приобретают ускорения (динамическое проявление сил), либо деформируются, т. е. изменяют свою форму и размеры (статическое проявление сил). В каждый момент времени сила характеризуется числовым значением, направлением в пространстве и точкой приложения. Итак, сила— это векторная величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры.
§ 6. Второй закон Ньютона
Второй закон Ньютона — основной закон динамики поступательного движения — отвечает на вопрос, как изменяется механическое движение материальной точки (тела) под действием приложенных к ней сил.
Если рассмотреть действие различных сил на одно и то же тело, то оказывается, что ускорение, приобретаемое телом, всегда прямо пропорционально равнодействующей приложенных сил:
При действии одной и той же силы на тела с разными массами их ускорения оказываются различными, а именно
Используя выражения (6.1) и (6.2) и учитывая, что сила и ускорение—величины векторные, можем записать
а = kF/m. (6.3)
Соотношение (6.3) выражает второй закон Ньютона: ускорение, приобретаемое материальной точкой (телом), пропорционально вызывающей его силе, совпадает с нею по направлению и обратно пропорционально массе материальной точки (тела).
В СИ коэффициент пропорциональности k= 1. Тогда

 (6.4)
(6.4)
Учитывая, что масса материальной точки (тела) в классической механике есть величина постоянная, в выражении (6.4) ее можно внести под знак производной:
 (6.5)
(6.5)
 (6.6)
(6.6)
численно равная произведению массы материальной точки на ее скорость и имеющая направление скорости, называется импульсом (количеством движения) этой материальной точки.
Подставляя (6.6) в (6.5), получим
 (6.7)
(6.7)
Это выражение — более общая формулировка второго закона Ньютона: скорость изменения импульса материальной точки равна действующей на нее силе. Выражение (6.7) называется уравнением движения материальной точки.
Единица силы в СИ — ньютон (Н): 1 Н — сила, которая массе 1 кг сообщает ускорение 1 м/с 2 в направлении действия силы:
1 Н = 1 кг×м/с 2 .
Второй закон Ньютона справедлив только в инерциальных системах отсчета. Первый закон Ньютона можно получить из второго. Действительно, в случае равенства нулю равнодействующей сил (при отсутствии воздействия на тело со стороны других тел) ускорение (см. (6.3)) также равно нулю. Однако первый закон Ньютона рассматривается как самостоятельный закон (а не как следствие второго закона), так как именно он утверждает существование инерциальных систем отсчета, в которых только и выполняется уравнение (6.7).
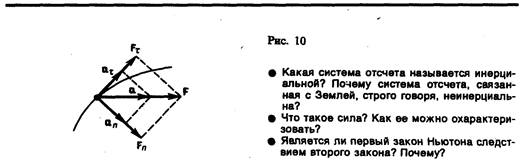
В механике большое значение имеет принцип независимости действия сил: если на материальную точку действует одновременно несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто других сил не было. Согласно этому принципу, силы и ускорения можно разлагать на составляющие, использование которых приводит к существенному упрощению решения задач. Например, на рис. 10 действующая сила F=ma разложена на два компонента: тангенциальную силу Ft, (направлена по касательной к траектории) и нормальную силу Fn (направлена по нормали к центру кривизны). Используя выражения  и
и  , а также
, а также  , можно записать:
, можно записать:
Если на материальную точку действует одновременно несколько сил, то, согласно принципу независимости действия сил, под F во втором законе Ньютона понимают результирующую силу.
§ 7. Третий закон Ньютона
Взаимодействие между материальными точками (телами) определяется третьим законом Ньютона: всякое действие материальных точек (тел) друг на друга носит характер взаимодействия; силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей эти точки:
где F12 — сила, действующая на первую материальную точку со стороны второй;
F21 — сила, действующая на вторую материальную точку со стороны первой. Эти силы приложены к разным материальным точкам (телам), всегда действуют парами и являются силами одной природы.
Третий закон Ньютона позволяет осуществить переход от динамики отдельной материальной точки к динамике системы материальных точек. Это следует из того, что и для системы материальных точек взаимодействие сводится к силам парного взаимодействия между материальными точками.
Обсуждая до сих пор силы, мы не интересовались их происхождением. Однако в механике мы будем рассматривать различные силы: трения, упругости, тяготения.
Из опыта известно, что всякое тело, движущееся по горизонтальной поверхности другого тела, при отсутствии действия на него других сил с течением времени замедляет свое движение и в конце концов останавливается. Это можно объяснить существованием силы трения, которая препятствует скольжению соприкасающихся тел друг относительно друга. Силы трения зависят от относительных скоростей тел. Силы трения могут быть разной природы, но в результате их действия механическая энергия всегда превращается во внутреннюю энергию соприкасающихся тел.
Различают внешнее (сухое) и внутреннее (жидкое или вязкое) трение. Внешним трением называется трение, возникающее в плоскости касания двух соприкасающихся тел при их относительном перемещении. Если соприкасающиеся тела неподвижны друг относительно друга, говорят о трении покоя, если же происходит относительное перемещение этих тел, то в зависимости от характера их относительного движения говорят о трении скольжения, качения или верчения.
Внутренним трением называется трение между частями одного и того же тела, например между различными слоями жидкости или газа, скорости которых меняются от слоя к слою. В отличие от внешнего трения здесь отсутствует трение покоя. Если тела скользят относительно друг друга и разделены прослойкой вязкой жидкости (смазки), то трение происходит в слое смазки. В таком случае говорят о гидродинамическом трении (слой смазки достаточно толстый) и граничном трении (толщина смазочной прослойки »0,1 мкм и меньше).
Обсудим некоторые закономерности внешнего трения. Это трение обусловлено шероховатостью соприкасающихся поверхностей; в случае же очень гладких поверхностей трение обусловлено силами межмолекулярного притяжения.
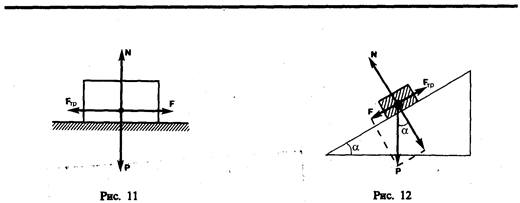
Рассмотрим лежащее на плоскости тело (рис. 11), к которому приложена горизонтальная сила F. Тело придет в движение лишь тогда, когда приложенная сила F будет больше силы трения Fтр. Французские физики Г. Амонтон (1663—1705) и Ш. Кулон (1736—1806) опытным путем установили следующий закон: сила трения скольжения Fтр пропорциональна силе N нормального давления, с которой одно тело действует на другое:
где f — коэффициент трения скольжения, зависящий от свойств соприкасающихся поверхностей.
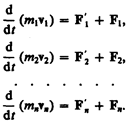
Найдем значение коэффициента трения. Если тело находится на наклонной плоскости с углом наклона a (рис.12), то оно приходит в движение, только когда тангенциальная составляющая F силы тяжести Р больше силы трения Fтр. Следовательно, в предельном случае (начало скольжения тела) F=Fтр. или Psin a0 = f N = f P cos a0,откуда
Таким образом, коэффициент трения равен тангенсу угла a0, при котором начинается скольжение тела по наклонной плоскости.
Для гладких поверхностей определенную роль начинает играть межмолекулярное притяжение. Для них применяется закон трения скольжения
где р0 — добавочное давление, обусловленное силами межмолекулярного притяжения, которые быстро уменьшаются с увеличением расстояния между частицами; S — площадь контакта между телами; fист — истинный коэффициент трения скольжения.
Трение играет большую роль в природе и технике. Благодаря трению движется транспорт, удерживается забитый в стену гвоздь и т. д.
В некоторых случаях силы трения оказывают вредное действие и поэтому их надо уменьшать. Для этого на трущиеся поверхности наносят смазку (сила трения уменьшается примерно в 10 раз), которая заполняет неровности между этими поверхностями и располагается тонким слоем между ними так, что поверхности как бы перестают касаться друг друга, а скользят друг относительно друга отдельные слои жидкости. Таким образом, внешнее трение твердых тел заменяется значительно меньшим внутренним трением жидкости.
Радикальным способом уменьшения силы трения является замена трения скольжения трением качения (шариковые и роликовые подшипники и т. д.). Сила трения качения определяется по закону, установленному Кулоном:
где r — радиус катящегося тела; fк — коэффициент трения качения, имеющий размерность dim fк =L. Из (8.1) следует, что сила трения качения обратно пропорциональна радиусу катящегося тела.
§ 9. Закон сохранения импульса. Центр масс
Для вывода закона сохранения импульса рассмотрим некоторые понятия. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой. Силы взаимодействия между материальными точками механической системы называются — внутренними. Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними. Механическая система тел, на которую не действуют внешние силы, называется замкнутой (или изолированной). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.
Рассмотрим механическую систему, состоящую из n тел, масса и скорость которых соответственно равны m1, m2,. mn, и v1, v2. vn. Пусть  — равнодействующие внутренних сил, действующих на каждое из этих тел, a
— равнодействующие внутренних сил, действующих на каждое из этих тел, a  — равнодействующие внешних сил. Запишем второй закон Ньютона для каждого из n тел механической системы:
— равнодействующие внешних сил. Запишем второй закон Ньютона для каждого из n тел механической системы:
Складывая почленно эти уравнения, получаем

Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то


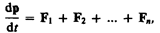 (9.1)
(9.1)
где  — импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
— импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
В случае отсутствия внешних сил (рассматриваем замкнутую систему)

Последнее выражение и является законом сохранения импульса: импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения импульса справедлив не только в классической физике, хотя он и получен как следствие законов Ньютона. Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон сохранения импульса — фундаментальный закон природы.
Дата добавления: 2017-04-20 ; просмотров: 1133 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник


