Общее уравнение плоскости
В данной статье мы рассмотрим общее уравнение плоскости в пространстве. Определим понятия полного и неполного уравнения плоскости. Для построения общего уравнения плоскости пользуйтесь калькулятором уравнение плоскости онлайн.
Пусть задана произвольная декартова прямоугольная система координат Oxyz. Общим уравнением плоскости называется линейное уравнение вида:
где A, B, C, D − некоторые постоянные, причем хотя бы один из элементов A , B и C отлично от нуля.
Мы покажем, что линейное уравнение (1) в пространстве определяет плоскость и любой плоскость в пространстве можно представить линейным уравнением (1). Докажем следующую теорему.
Теорема 1. В произвольной декартовой прямоугольной системе координат в пространстве каждая плоскость α может быть задана линейным уравнением (1). Обратно, каждое линейное уравнение (1) в произвольной декартовой прямоугольной системе координат в пространстве определяет плоскость.
Доказательство. Достаточно доказать, что плоскость α определяется линейным уравнением при какой нибудь одной декартовой прямоугольной системе координат, поскольку тогда она будет определяться линейным уравнением и при любом выборе декартовой прямоугольной системы координат.
Пусть в пространстве задана плоскость α. Выберем оси Ox и Oy так, чтобы они располагались на плоскости α, а ось Oz направим перпендикулярно к этой плоскости. Тогда линейное уравнение z=0 будет уравнением плоскости, т.к. координаты любой точки, принадлежащей этой плоскости удовлетворяют уравнению z=0, а координаты любой точки, не лежащей на этой плоскости − нет. Первая часть теоремы доказана.
Пусть фиксирована произвольная декартова прямоугольная система координат Oxyz. Рассмотрим линейное уравнение (1), где хотя бы один из элементов A , B и C отлично от нуля. Тогда уравнение (1) имеет хотя бы одно решение x0, y0, z0. Действительно. Пусть из коэффициентов A≠0. Возьмем произвольные числа y0, z0. Тогда
 . . |
Таким образом, существует точка M0(x0, y0, z0), координаты которой удовлетворяют уравнению (1):
Вычитая из уравнения (1) тождество (2), получим
которая эквивалентна уравнению (1).
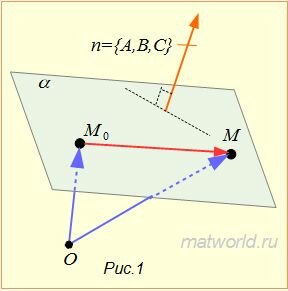 |
Покажем, что (3) определяет некоторую плоскость, проходящую через точку M0(x0, y0, z0) и перпендикулярную вектору n=<A,B,C> (n≠0, так как хотя бы один из чисел A,B,C отлично от нуля).
Если точка M0(x0, y0, z0) принадлежит плоскости α, то ее координаты удовлетворяют уравнению (3), т.к. векторы n=<A,B,C> и  перпендикулярны (Рис.1) и их скалярное произведение равно нулю:
перпендикулярны (Рис.1) и их скалярное произведение равно нулю:
  . . |
Если же точка M(x, y, z) не лежит на плоскости α, то векторы n=<A,B,C> и не ортогональны. Тогда их скалярное произведение не равно нулю, т.е. координаты точки M(x, y, z) не удовлетворяют условию (3). Теорема доказана.
Одновременно с доказательством теоремы 1 мы получили следующее утверждение.
Утверждение 1. В декартовой прямоугольной системе координат вектор с компонентами (A,B,C) перпендикулярен плоскости Ax+By+Cz+D=0.
Вектор n=(A,B,C) называется нормальным вектором плоскости , определяемой линейным уравнением (1).
Утверждение 2. Если два общих уравнения плоскости
определяют одну и ту же плоскость, то найдется такое число λ, что выпонены равенства
Умножая уравнение (7) на λ и вычитая из него уравнение (8) получим:
Так как выполнены первые три равенства из выражений (6), то D1λ−D2=0. Т.е. D2=D1λ. Утверждение доказано.
Неполные уравнения плоскости
Определение 1. Общее уравнение плоскости (1) называется полным , если все коэффициенты A, B, C, D отличны от нуля. Если же хотя бы один из коэффициентов A, B, C, D равен нулю, то общее уравнение плоскости называется неполным .
Рассмотрим все возможные варианты неполных уравнений плоскости:
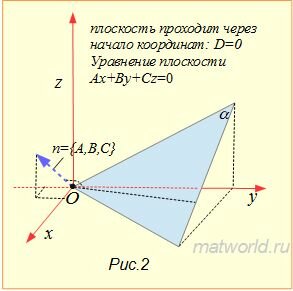
При D=0, имеем уравнение плоскости Ax+By+Cz=0, проходящей через начало координат (Рис.2). Действительно, точка O(0,0,0) удовлетворяет этой системы линейных уравнений.
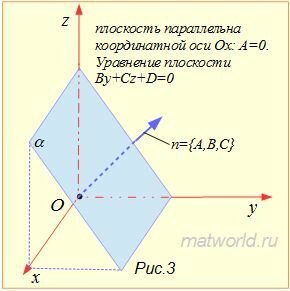
При A=0, имеем уравнение плоскости By+Cz+D=0, которая параллельна оси Ox (Рис.3). В этом случае нормальный вектор плоскости n=<0,B,C> лежит на координатной плоскости Oyz.
  |
При B=0, имеем уравнение плоскости Ax+Cz+D=0, которая параллельна оси Oy (Рис.4).
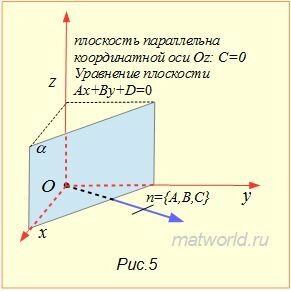
При C=0, имеем уравнение плоскости Ax+By+D=0, которая параллельна оси Oz (Рис.5).
  |
При A=0,B=0 имеем уравнение плоскости Cz+D=0, которая параллельна координатной плоскости Oxy (Рис.6).
При B=0,C=0 имеем уравнение плоскости Ax+D=0, которая параллельна координатной плоскости Oyz (Рис.7).
  |
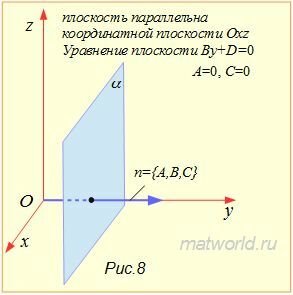
При A=0,C=0 имеем уравнение плоскости By+D=0, которая параллельна координатной плоскости Oxz (Рис.8).
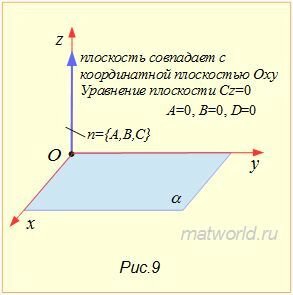
При A=0,B=0,D=0 имеем уравнение плоскости Cz=0, которая совпадает с координатной плоскостью Oxy (Рис.9).
  |
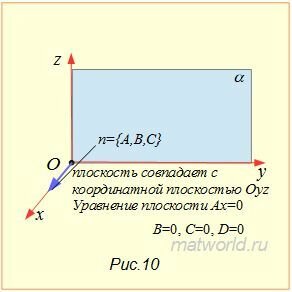
При B=0,C=0,D=0 имеем уравнение плоскости Ax=0, которая совпадает с координатной плоскостью Oyz (Рис.10).
При A=0,C=0,D=0 имеем уравнение плоскости By=0, которая совпадает с координатной плоскостью Oxz (Рис.11).
  |
Рассмотрим примеры построения общего уравнения плоскости.
Пример 1. Построить общее уравнение плоскости, проходящей через точку M(4,−1,2) параллельной координатной плоскости Oxy.
Решение. Общее уравнение плоскости, проходящей через некоторую точку M(x0,y0,z0) имеет вид (3). Подставляя координаты точки M в (3), получим:
Так как плоскость параллельна координатной плоскости Oxy, то направляющий вектор имеет следующий вид n=<A,B,C>=<0,0,1>, т.е. A=0, B=0, C=1.
Подставляя коэффициенты A,B,C в (9), получим:
Пример 2. Построить общее уравнение плоскости, проходящей через начало координат и имеющий нормальный вектор n==<2,3,1>.
Решение. Начало координат имеет коэффициенты (0,0,0). Общее уравнение плоскости, проходящей через некоторую точку M(x0,y0,z0) имеет вид (3). Подставляя коэффициенты начальной точки в (3), получим:
Так как плоскость имеет нормальный вектор n=<A,B,C>=<2,3,1>, т.е. A=2, B=3, C=1, подставляя коэффициенты A,B,C в (10), получим:
Онлайн калькулятор для построения общего уравнения плоскости находится здесь. Там же вы найдете примеры построения общего уравнения плоскости, если известны три точки этой плоскости или если известна одна точка и нормальный вектор этой плоскости.
Источник
Что значит плоскость xoy
2.3.3. йУУМЕДПЧБОЙЕ ПВЭЕЗП ХТБЧОЕОЙС РМПУЛПУФЙ.
рХУФШ РМПУЛПУФШ ЪБДБОБ ПВЭЙН ХТБЧОЕОЙЕН
Ax + By + Cz + D = 0.
чЩСУОЙН, ЛБЛЙЕ ЮБУФОЩЕ РПМПЦЕОЙС ПФОПУЙФЕМШОП ПУЕК ЛППТДЙОБФ ЪБОЙНБЕФ РМПУЛПУФШ, ЕУМЙ ОЕЛПФПТЩЕ ЛПЬЖЖЙГЙЕОФЩ ЬФПЗП ХТБЧОЕОЙС ПВТБЭБАФУС Ч ОПМШ.
- D = 0. хТБЧОЕОЙЕ РМПУЛПУФЙ РТЙОЙНБЕФ ЧЙД:
Ax + By + Cz = 0.
ьФПНХ ХТБЧОЕОЙА ХДПЧМЕФЧПТСЕФ ФПЮЛБ п(0, 0, 0), РПЬФПНХ РМПУЛПУФШ РТПИПДЙФ ЮЕТЕЪ ОБЮБМП ЛППТДЙОБФ. - у = 0. хТБЧОЕОЙЕ РМПУЛПУФЙ РТЙНЕФ ЧЙД:
Ax + By + D = 0. Б УБНБ РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OZ.
Б УБНБ РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OZ.
бОБМПЗЙЮОП ТБУУХЦДБС, РПМХЮЙН:РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OY. РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OX - D = C = 0. хТБЧОЕОЙЕ РМПУЛПУФЙ РТЙНЕФ ЧЙД:
Ax + By = 0.
ьФП ХТБЧОЕОЙЕ РМПУЛПУФЙ, РТПИПДСЭЕК ЮЕТЕЪ ОБЮБМП ЛППТДЙОБФ Й РБТБММЕМШОПК ПУЙ OZ, ФП ЕУФШ ЬФП ВХДЕФ РМПУЛПУФШ, РТПИПДСЭБС ЮЕТЕЪ ПУШ OZ.
бОБМПЗЙЮОП, ЕУМЙ B = C = 0, ХТБЧОЕОЙЕ РМПУЛПУФЙ ВХДЕФ:
Ax + D = 0,
ФП ЕУФШ РМПУЛПУФШ РТПИПДЙФ ЮЕТЕЪ ПУШ OY.
оБЛПОЕГ, ЕУМЙ A = D = 0, хТБЧОЕОЙЕ РМПУЛПУФЙ ВХДЕФ:
By + Cz = 0.
ФП ЕУФШ РМПУЛПУФШ РТПИПДЙФ ЮЕТЕЪ ПУШ OX. - еУМЙ ТБЧОЩ ОХМА ДЧБ ЛПЬЖЖЙГЙЕОФБ РТЙ ФЕЛХЭЙИ ЛППТДЙОБФБИ, ФП ХТБЧОЕОЙЕ ПРТЕДЕМСЕФ РМПУЛПУФШ, РБТБММЕМШОХА ЛППТДЙОБФОЩН РМПУЛПУФСН: — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOY. — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ ZOY. — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOZ.
- еУМЙ — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ YOZ. — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOZ. — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOY.
 Б УБНБ РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OZ.
Б УБНБ РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OZ.  РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OY.
РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OY.  РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OX
РМПУЛПУФШ РБТБММЕМШОБ ПУЙ OX  — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOY.
— РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOY.  — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ ZOY.
— РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ ZOY.  — РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOZ.
— РМПУЛПУФШ РБТБММЕМШОБ РМПУЛПУФЙ XOZ.  — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ YOZ.
— ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ YOZ.  — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOZ.
— ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOZ.  — ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOY.
— ЬФП ХТБЧОЕОЙЕ РМПУЛПУФЙ XOY.Источник
Примеры
Пример 1. Покажем, что точка M (1, 2, 10) принадлежит плоскости x − y + 1 = 0 .
Решение. Подставляем координаты точки x = 1 , y = 2 и z = 10 в уравнение плоскости x − y + 1 = 0 . Получаем
1 − 2 + 1 = 0 Ю 0 ≡ 0
Так как уравнение превратилось в тождество, точка M (1, 2, 10) принадлежит плоскости x − y + 1 = 0 .
Пример 2. Найдем точки пересечения плоскости x − y + 1 = 0 с осями координат.
1. Чтобы найти точку пересечения плоскости x − y + 1 = 0 с осью O X , надо решить систему уравнений
|
Получаем x = −1 , y = 0 , z = 0 .
2. Чтобы найти точку пересечения плоскости x − y + 1 = 0 с осью O Y , надо решить систему уравнений
|
Получаем x = 0 , y = 1 , z = 0 .
3. Чтобы найти точку пересечения плоскости x − y + 1 = 0 с осью O Z , надо решить систему уравнений
|
Система не имеет решений. Следовательно, плоскость x − y + 1 = 0 параллельна оси O Z .
Пример 3. Найдем нормальный вектор плоскости x − z + 2 = 0 и опишем ее положение в пространстве относительно координатных осей.
1. В качестве нормального вектора плоскости x − z + 2 = 0 возьмем вектор, координаты которого равны коэффициентам при x , y и z в уравнении плоскости, т.е.
| → |
| n |
= <1, 0, −1>.
2. Находим точки пересечения плоскости x − z + 2 = 0 с осями координат, решая соответствующие системы уравнений (см. задачу 2). Получаем точки пересечения: с осью O X ( −2, 0, 0) , с осью O Z (0, 0, 2) , с осью O Y плоскость не пересекается.Следовательно, плоскость x − z + 2 = 0 параллельна оси O Y .
Пример 4. Составим уравнение координатной плоскости X O Y .
Решение. Уравнение плоскости, проходящей через данную точку M ( x 0 , y 0 , z 0 ) перпендикулярно данному вектору
| → |
| n |
= < A , B , C >имеет вид
| (1) |
Выберем в качестве нормального вектора плоскости X O Y базисный вектор
| → |
| k |
= <0, 0, 1>, а в качестве точки, принадлежащей плоскости X O Y , — начало координат O (0, 0, 0) . Тогда уравнение (1) приобретает вид:
| 0 ( x − 0) + 0 ( y − 0) + 1 ( z − 0) = 0 Ю z = 0. |
Таким образом, уравнение плоскости X O Y : z = 0 .
Пример 5. Найдем углы между плоскостями 2 x + 2 y + z − 1 = 0 и x + z − 1 = 0 .
Решение. Поскольку двугранные углы между плоскостями равны углам между нормальными векторами этих плоскостей (
| → |
| n |
1 = <2, 2, 1>и
| → |
| n |
2 = <1, 0, 1>), имеем
cos j =
=
=
=
. |
Таким образом, углы между плоскостями равны π/4 и 3π/4 .
Пример 6. Составим уравнение плоскости, проходящей через три данные точки M (1, 2, 3), N (0, 2, −2) и P ( 3, 1, 0) (рис.1).

1. Пусть Q ( x , y , z ) — произвольная точка пространства. Построим векторы M Q = < x − 1, y − 2, z − 3>, M N = < −1, 0, −5>и M P = <2, −1, −3>. Точка Q принадлежит искомой плоскости тогда и только тогда, когда векторы M Q , M N и M P компланарны.
2. Условие компланарности трех векторов
| = 0 . |
3. Разлагая определитель по первой строке, после несложных преобразований получаем уравнение искомой плоскости:
| 5 x + 13 y − z − 28 = 0 . |
Рекомендуем сделать проверку, подставив в уравнение плоскости координаты точек M , N и P .
Источник


