- § 9.3. Скорость относительного движения двух тел. Развитие темы
- Решим задачу
- Решим задачу
- Решим задачу
- Модуль силы, скорости, импульса. Что это?!
- Сила и модуль силы
- Что такое модуль силы?
- Что это модуль скорости?
- Модуль импульса и модуль оси
- Относительная скорость.
- Относительность механического движения
- теория по физике 🧲 кинематика
- Относительность перемещения
- Относительность скорости в ПСО и НСО
- Относительная скорость двух тел
- Правила сложения векторов
- Правила вычитания векторов
§ 9.3. Скорость относительного движения двух тел. Развитие темы
Пусть два тела движутся вдоль одной прямой и мы знаем скорости этих тел. Как найти, с какой скоростью движется одно из этих тел относительно другого? Рассмотрим сначала случай, когда скорости тел направлены одинаково.
Решим задачу
Из поселка одновременно выехали в одном направлении грузовик со скоростью 40 км/ч и легковой автомобиль со скоростью 60 км/ч. С какой скоростью движется легковой автомобиль относительно грузовика?
Решение. За час грузовик проедет 40 км, а легковой автомобиль проедет 60 км. Расстояние между ними будет равно разности расстояний, пройденных автомобилями, то есть 20 км (рис. 9.2). Значит, легковой автомобиль движется относительно грузовика со скоростью 20 км/ч.

Рис 9.2. Начальное положение автомобилей обозначено черным кружком, положение грузовика через час после начала движения — зеленым, а легкового автомобиля — синим
Итак, если два тела движутся в одном направлении со скоростями v1 и v2, причем v1 > v2, то одно тело движется относительно другого со скоростью vотн = v1 — v2. При этом расстояние между телами может не только увеличиваться, но и уменьшаться: например, если легковой автомобиль догоняет грузовик.
Рассмотрим теперь случай, когда скорости тел направлены противоположно.
Решим задачу
Из поселка одновременно выехали в противоположных направлениях грузовик со скоростью 40 км/ч и легковой автомобиль со скоростью 60 км/ч. С какой скоростью движется легковой автомобиль относительно грузовика?
Решение. За час грузовик проедет 40 км, а легковой автомобиль проедет 60 км. Но расстояние между ними будет равно теперь сумме расстояний, пройденных автомобилями (рис. 9.3), то есть 100 км. Значит, легковой автомобиль движется относительно грузовика со скоростью 100 км/ч.

Рис. 9.3. Начальное положение автомобилей (черный кружок) и их положение через час после начала движения (зеленый и синий кружки)
Итак, если два тела движутся в противоположных направлениях со скоростями v1 и v2, то одно тело движется относительно другого со скоростью vотн = v1 + v2 При этом расстояние между телами может как увеличиваться, так и уменьшаться: например, если автомобили едут навстречу друг другу. Рассмотрим это на следующем примере.
Решим задачу
Из двух городов, расстояние между которыми 300 км, одновременно навстречу друг другу по прямой дороге выехали грузовик и легковой автомобиль. Скорость грузовика 40 км/ч, а легкового автомобиля — 60 км/ч. Через какое время после выезда автомобилей расстояние между ними будет равно 100 км?
Решение. Так как автомобили едут в противоположных направлениях, то один автомобиль движется относительно другого со скоростью vотн = v1 + v2 = 40 км/ч + 60 км/ч = 100 км/ч. До встречи автомобили сближаются, то есть расстояние между ними уменьшается. Поскольку в начальный момент расстояние между ними было равно 300 км и каждый час оно уменьшается на 100 км, то расстояние между автомобилями станет равным 100 км через 2 ч после выезда. Но это не единственный ответ! Ведь после встречи, которая произойдет через 3 ч после выезда автомобилей, они начнут удаляться друг от друга, и расстояние между ними будет теперь увеличиваться на 100 км каждый час. Значит, есть еще один момент времени, когда расстояние между автомобилями будет равно 100 км: он наступит через час после встречи автомобилей, то есть через 4 ч после их выезда. Решить задачу — значит найти все ответы!
Источник
Модуль силы, скорости, импульса. Что это?!
В статье разберемся, что такое модуль. Модуль силы, скорости, импульса, что это всё? Давайте разбираться! 
Абсолютная величина, известная так же, как модуль, это всегда некое неотрицательное число, чье определение всегда зависит от типа числа. Символически модуль обозначается как: | x |.
Сила и модуль силы
В процессе изучения физики приходится сталкиваться с различными явлениями, рассчитывать скорость, силу и многие другие параметры. Не менее важно понять какими методами, и в каких единицах делаются расчеты по характеристикам этих явлений. Одна из физических величин это сила. Сила представляет собой величину, которая способна показать меру воздействия на тело посредством другого тела или со стороны полей. Взаимодействие образуется за счет тех полей, которые создаются самими телами в случае контакта. Всего различают четыре вида взаимодействия: слабое, сильное, гравитационное, электромагнитное. Сила обозначается буквой F от латинского слова fortis, что в переводе означает сильный.
Что такое модуль силы?
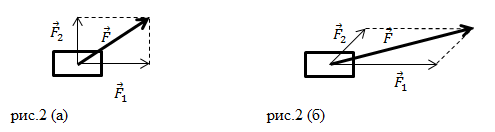
Сила является векторной величиной, это значит, что она обладает, так как направлением, так и модулем. Не так часто встречается случай, когда на тело воздействует одна единственная величина, чаще всего их несколько. В таком случае речь о равнодействующей силы, которая формируется за счет суммирования всех сил, влияющие на тело одновременно. Стоит отметить, что параметр равнодействующая сила является искусственным и создан только для удобства проведения расчетов.
Но что же это модуль силы? Модуль является абсолютной величиной. Это такая величина, которая отражается числом с плюсом во всех случаях. Другими словами характеристики какого-то процесса или явления выражены конкретными числами. Каждая сила характеризуется направлением и величиной, эта величина и есть модуль, вот что это модуль силы.
Модуль равнодействующих двух сил определяется по формулам:
- F=F1 + F2 (в случае сил с одинаковым направлением)
- F=F1 — F2 (силы с разным направлением)
Для модуля равнодействующих нескольких сил все намного сложнее. Для начала надо вводить систему координат, записать и высчитать проекции сил, потом использовать теорему Пифагоры.
Исаак Ньютон внес серьезный вклад в работу над различными видами сил. В связи с этим в качестве единицы измерения силы применяется Н (Ньютон).
Что это модуль скорости?
Каждое тело в процессе перемещения развивает энную скорость, которая характеризуется двумя параметрами: направление и модуль. Что же это модуль скорости? Это число, обозначающее, насколько быстро перемещается тело. Сама скорость является вектором. У нее есть все свойства вектора перемещения, так как выражается посредством него и обладает всеми свойствами данного вектора.
Для определения модуля скорости необходимо учитывать закон движения со всеми своими правилами. Вычисление модуля скорости может осуществляться посредством графика движения. Если недостаточно понятно, что это модуль скорости тела можно использовать одно из понятий: скалярная величина и алгебраическая скорость. Скорость как вектор это величина с направлением и численным значением, при этих условиях модуль скорости тела это не что иное, как длина этого вектора.
Чаще всего речь о прямолинейном движении в рамках координат (x;t). В таком случае для определения данного параметра подойдет формула:
v = S/t = (x — x0)/t.
Это значит, что необходимо нужно отнять начальную координату от конечной координаты. Полученный результат нужно разделить на то время, за которое имело место изменение координаты.
Пример определения модуля скорости одного тела относительно другого на основе задачи: два тела перемещаются со скоростью 8 и 6 м/с. Направление их движения перпендикулярное друг другу. Поэтапное решение осуществляется таким образом:
- Вычисляется скорость v21 на базе закона сложения скоростей v2 = v21 + v1, а значит v21 = v2 – v1.
- Определяется модуль скорости тела согласно теореме Пифагора.
Модуль импульса и модуль оси
Импульс представляет собой векторную величину, чье направление идентично направлению вектора скорости. Он может поменяться только в том случае, если произойдет изменение скорости под воздействием какой-то силы. Но что это модуль импульса и как он рассчитывается? Модуль импульса определяется согласно произведению массы тела на скорость. Его можно легко вычислить, если есть данные по скорости и по массе.
Что это модуль оси? Разъяснение данного понятия, может быть сделана на основе определения понятия ось. Ось представляет собой прямую с заданным направлением. В каком-то роде можно сказать, что это нечто иное, как вектор с величиной модуля, которая тянется к бесконечности. Это и есть модуль оси. Для обозначения оси можно использовать любую букву: t, Z, Y, X и т.д. На ней определяется точка О, известная как начало отсчета. Все расстояния до других точек определяются относительно нее. Для того чтобы сделать проекцию точки на ось, нужно провести перпендикулярную прямую через эту точку на саму ось. В таком случае проекция этой точки, сама точка.
Если материал был полезен, вы можете отправить донат или поделиться данным материалом в социальных сетях:
Источник
Относительная скорость.
Относительная скорость – это физическая величина, равная векторной разности скоростей, заданных относительно неподвижной системы отсчета.
При изучении механического движения в первую очередь подчеркивается его относительность. При изучении различных свойств движения тела предполагается, что рассматривается абсолютное движение (т. е. движение, отнесенное к неподвижным осям). Во многих случаях возникает необходимость определить относительное движение, отнесенное к системе отсчета, движущейся по отношению к неподвижным осям.
Относительное движение точки по отношению к подвижной системе отсчета может рассматриваться как абсолютное движение, и обладает всеми свойствами абсолютного движения.
Движение можно рассматривать в разных системах отсчета. Выбор системы отчета диктуется удобством: ее нужно выбрать так, чтобы изучаемое движение и его закономерности выглядели по возможности проще. Для перехода от одной системы отсчета к другой необходимо знать, какие характеристики движения изменяются и каким образом, а какие остаются неизменными.
Исходя из опытов можно утверждать, что при рассмотрении движений, происходящих со скоростями, малыми по сравнению со скоростью света, время неизменно во всех системах отсчета, что означает, что при измерении в любой системе отсчета промежуток времени между двумя событиями одинаков.
Что же касается пространственных характеристик, то положение тела изменяется при переходе к другой системе отсчета, однако при этом не меняется пространственное расположение этих двух событий.
Теперь рассмотрим изменение скорости движения тел при переходе от одной системы отсчета к другой, которая движется относительно первой.
Рассмотрим пример переправы на пароме, движущемся поступательно относительно берегов (относительно земли). Вектор перемещения пассажира относительно берегов обозначим через Δr, а относительно парома – через Δr´. Перемещение парома относительно земли за то же время Δt обозначим через ΔR. В этом случае
Разделим равенство почленно на промежуток времени Δt, в течение которого произошли эти перемещения. Перейдя к пределу Δt >0, получим аналогичное соотношение для скоростей:
где υ – скорость пассажира относительно земли, V – скорость парома относительно земли, υ´ — скорость пассажира относительно парома. Этим равенством выражается правило сложения скоростей, которое при одновременном участии тела в двух движениях можно трактовать как закон преобразования скорости тела при переходе от одной системы отсчета к другой. На самом деле, υ и υ´ — скорости пассажира в двух разных системах отсчета, а V – скорость одной системы (парома) относительно другой (земли).
Из формулы (2) следует, что относительная скорость двух тел одинакова во всех системах отсчета. При переходе к новой системе отсчета к скорости каждого тела прибавляется один и тот же вектор V скорости системы отсчета. Поэтому разность векторов скоростей тел υ – υ´ не изменяется. Относительная скорость тел абсолютна.
Источник
Относительность механического движения
теория по физике 🧲 кинематика
Под относительностью понимают зависимость чего-либо от выбора системы отсчета. Так, покой и движение тела, его положение в пространстве всегда относительны. Человек, сидящий внутри движущегося автомобиля, покоится относительно этого автомобиля. Но относительно предметов снаружи он движется с некоторой скоростью.
Относительность перемещения
Пусть движение материальной точки (МТ) описывается относительно двух систем отсчета: подвижной (ПСО) и неподвижной (НСО). Зная, как эта точка движется относительно ПСО, и, как ПСО движется относительно НСО, можно вычислить перемещение точки относительно НСО. В этом заключается правило сложения перемещений:
s′ — перемещение МТ относительно НСО, s 1— перемещение МТ относительно ПСО, s 2 — перемещение ПСО относительно НСО.
Чтобы применять правило сложения перемещений, нужно уметь складывать вектора.
Полезные факты
- Если тело движется в направлении движения ПСО, то модуль его перемещения относительно НСО равен сумме модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если тело движется противоположно движению ПСО, то модуль его перемещения относительно НСО равен разности модулей перемещения этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его перемещения относительно НСО равен корню из суммы квадратов перемещений этого тела относительно ПСО и перемещения ПСО относительно НСО:
- Если относительно ПСО тело покоится, то его перемещение относительно НСО равно перемещению ПСО относительно НСО: при s1=0,перемещение s′ = s2
- Если тело движется относительно двух НСО, то его перемещение относительно НСО1 равно перемещению движения относительно НСО2. В этом случае одну из систем можно принять за ПСО с нулевой скоростью. Тогда ее перемещение относительно НСО будет равно 0. При s2=0,перемещение s′ = s1
Пример №1. Человек прошел в автобусе 2 метра в направлении заднего выхода. За это же время автобус успел переместиться относительно остановки на 10 м. Найти перемещение человека относительно автобусной остановки.
Так как человек двигался в сторону конца автобуса, он двигался противоположно его движению. В этом случае его перемещение будет равно модулю разности перемещений, совершенных человеком относительно автобуса и автобусом относительно остановки:
Относительность скорости в ПСО и НСО
Тела и системы отсчета могут двигаться с различной скоростью. Но, зная скорость движения МТ относительно ПСО и скорость движения ПСО относительно НСО, можно вычислить скорость движения МТ относительно НСО. В этом заключается правило сложения скоростей:
v′ — скорость МТ относительно НСО, v — скорость МТ относительно ПСО, u — скорость движения ПСО относительно НСО.
Складывая векторы скоростей, нужно пользоваться правилами сложения векторов.
Полезные факты
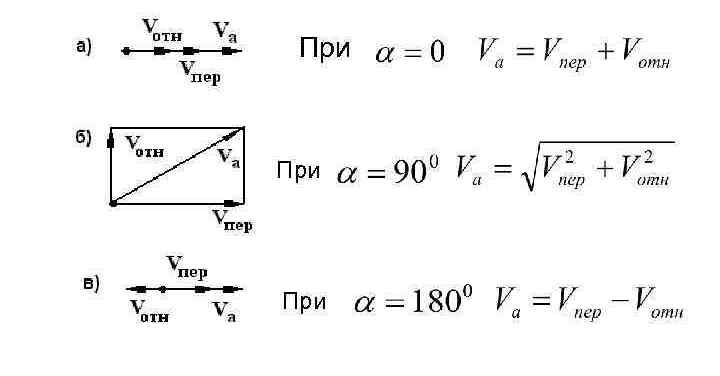
- Если тело движется в направлении движения ПСО, то модуль его скорости относительно НСО равен сумме модулей скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если тело движется противоположно движению ПСО, то модуль его скорости относительно НСО равен разности модуля скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если тело движется под прямым углом по отношению к направлению движения ПСО, то модуль его скорости относительно НСО равен корню из суммы квадратов скорости этого тела относительно ПСО и скорости ПСО относительно НСО:
- Если относительно ПСО тело покоится, то его скорость относительно НСО равна скорости ПСО относительно НСО: при v=0,скорость v′ = u
- Если тело движется относительно двух НСО, то его скорость относительно НСО1 равна скорости движения относительно НСО2. В этом случае одну из неподвижных систем можно принять за ПСО с нулевой скоростью. При u=0,скорость v′ = u
Пример №2. Моторная лодка должна пересечь реку, скорость течения которой равна 5 км/ч, по кратчайшему пути. Собственная скорость лодки равна 10 км/ч. Определить, под каким углом к берегу должна быть направлена лодка, чтобы она не отклонялась от кратчайшего пути.
Кратчайшим путем между двумя параллельными линиями является отрезок, заключенный между этими линиями при условии, что он лежит на прямой, пересекающей эти линии под прямым углом. На рисунке этот путь отметим отрезком АВ.
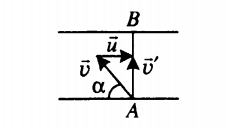
Лодка движется прямолинейно. Поэтому направление ее скорости относительно берега совпадает с направлением перемещения:
Векторы скоростей образуют прямоугольный треугольник, и собственная скорость лодки направлена к берегу под некоторым углом α. Косинус этого угла равен отношению прилегающего катета (скорости лодки относительно реки) к гипотенузе (скорости течения реки):
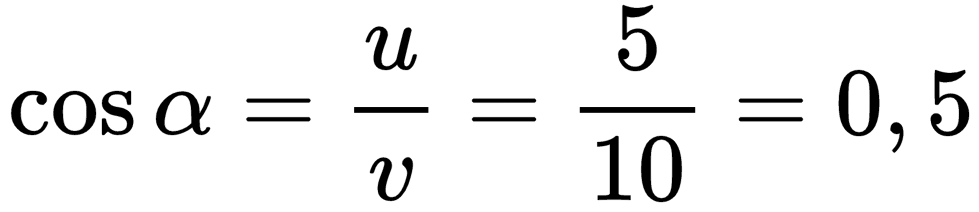
Косинусу 0,5 соответствует угол, равный 60 градусам.
Относительная скорость двух тел
Понятие относительной скорости вводится, когда рассматривается движение двух тел относительно друг друга внутри одной и той же системы отсчета (СО). Примером служат два движущихся автомобиля, в то время как их движение рассматривается относительно неподвижного объекта.
Относительная скорость равна векторной разности скоростей первого и второго тела относительно СО:
v отн — относительная скорость, или скорость первого тела относительно второго, v 1 и v 2 — скорость первого и второго тела относительно СО.
Варианты обозначения относительной скорости и их проекций:
- v 12 — скорость первого тела относительно второго. Ее проекция равна:
- v 21 — скорость второго тела относительно первого. Ее проекция равна v21x = v2x — v1x
Для вычисления относительной скорости движения тела важно уметь применять правила вычитания векторов.
Полезные факты
- Если тела движутся в одном направлении, то относительная скорость равна модулю разности скоростей первого и второго тела:
- Если тела движутся в противоположных направлениях, то относительная скорость равна сумме скоростей первого и второго тела:
- Если тела движутся взаимно перпендикулярно, то относительная скорость равна корню из суммы квадратов скоростей первого и второго тела:
Пример №3. Два автомобиля движутся противоположно друг другу. Скорость первого автомобиля относительно дороги равна 100 км/ч. Скорость второго автомобиля относительно первого равна 180 км/ч. Найти модуль скорости второго автомобиля относительно дороги.
Так как автомобили движутся в противоположном направлении, относительная скорость равна сумме скоростей первого и второго автомобиля. Поэтому скорость второго равна разности относительной скорости и скорости движения второго тела, которым в данном случае является первый автомобиль:

Скорость второго автомобиля относительно дороги равна 80 км/час.
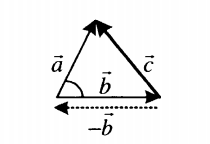
Правила сложения векторов
Эта таблица иллюстрирует правила сложения векторов на примере векторов a и b . Результатом их сложения является вектор c .
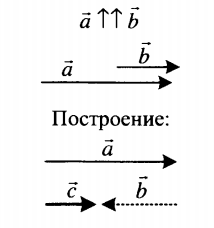
| Сложение двух сонаправленных векторов | |
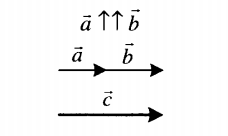 | Суммой двух сонаправленных векторов является вектор, направленный в ту же сторону. Его длина равна сумме длин слагаемых векторов: c = a + b. |
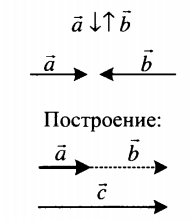
| Сложение двух противоположно направленных векторов | |
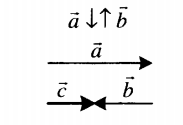 | Суммой двух противоположно направленных векторов является вектор, направленный в сторону большего по модулю вектора. Его длина равна модулю разности длин слагаемых векторов: c = |a – b|. |
| Сложение двух векторов, расположенных друг к другу под углом | |
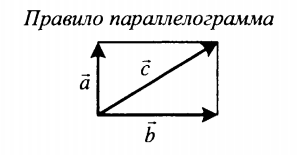
| Суммой двух векторов, расположенных друг к другу под углом является вектор, направление которого определяется графически методом треугольника или параллелограмма. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
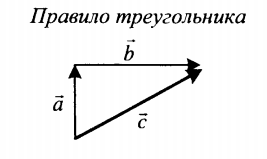 | Если слагаемые векторы перпендикулярны, для вычисления длины вектора их суммы используется теорема Пифагора:  . . |
 | |
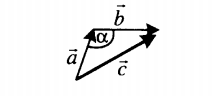 | Если слагаемые векторы расположены под тупым углом α, для вычисления длины вектора их суммы используется теорема косинусов:  . . |
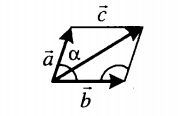 | Если слагаемые векторы расположены под острым углом α, для вычисления длины вектора их суммы используется теорема косинусов:  . . |
Правила вычитания векторов
Эта таблица иллюстрирует правила вычитания векторов на примере векторов  Результатом их вычитания является вектор
Результатом их вычитания является вектор  .
.
| Вычитание двух сонаправленных векторов | |
 | Разностью двух сонаправленных векторов является вектор, направленный в сторону большего по модулю вектора. Его длина равна модулю разности длин вычитаемых векторов: c = |a – b|. |
| Вычитание двух противоположно направленных векторов | |
 | Разность двух противоположно направленных векторов есть вектор, направленный в сторону уменьшаемого вектора. Его длина равна сумме длин вычитаемых векторов: c = a + b. |
| Вычитание двух векторов, расположенных друг к другу под углом | |
| Разностью двух векторов, расположенных друг к другу под углом является вектор, являющийся обратным вектору, образующемуся при сложении этих векторов. Его направление определяется графически. Его длина зависит от величины угла, под которым расположены два слагаемых векторов. | |
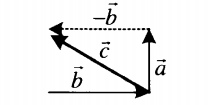 | Если вычитаемые векторы перпендикулярны, для вычисления длины вектора их разности используется теорема Пифагора:  . . |
 | Если вычитаемые векторы расположены под углом α, для вычисления длины вектора их разности используется теорема косинусов:  . . |
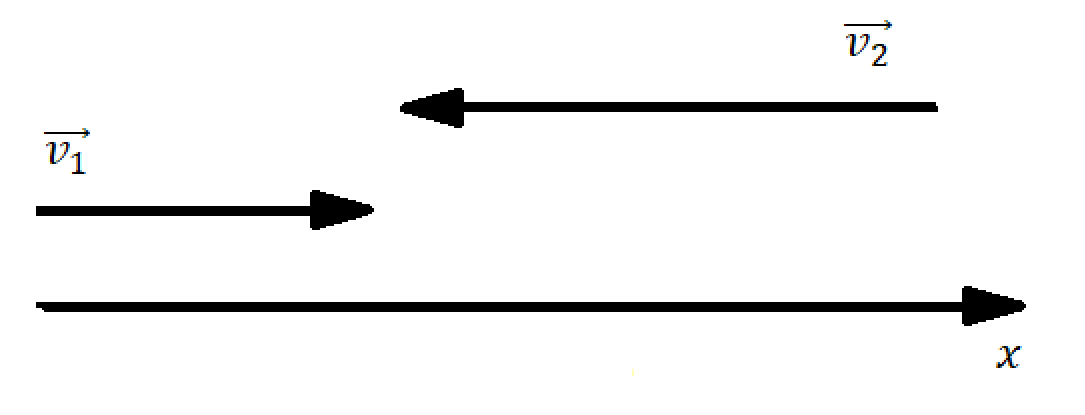
Два автомобиля движутся по прямому шоссе, первый — со скоростью v , второй — со скоростью –4 v . Найти скорость второго автомобиля относительно первого.
Алгоритм решения
- Записать данные в определенной системе отсчета.
- Изобразить графическую модель ситуации задачи.
- Записать классический закон сложения скоростей в векторном виде.
- Записать классический закон сложения скоростей в векторном виде применительно к условиям задачи.
- Найти искомую величину.
Решение
Записываем данные относительно Земли:
- Скорость первого автомобиля относительно оси ОХ: v 1 = v .
- Скорость второго автомобиля относительно оси ОХ: v 2 = –4 v .
Изображаем графическую модель ситуации. Так как у второго автомобиля перед вектором скорости стоит знак «–», первый и второй автомобили движутся во взаимно противоположных направлениях.
Записываем закон сложения скоростей в векторном виде:
v ′ — скорость второго автомобиля относительно оси ОХ ( v 2), v — скорость второго автомобиля относительно системы отсчета, связанной с первым автомобилем, u — скорость движения первого автомобиля относительно оси ОХ ( v 1).
Закон сложения скоростей в векторном виде применительно к условиям задачи будет выглядеть так:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Записываем закон сложения скоростей в векторном виде:
v ′ — скорость автомобиля относительно земли ( v 1), v — скорость второго автомобиля относительно системы отсчета, связанной со вторым автомобилем, u — скорость движения второго автомобиля относительно земли ( v 2). По условию задачи в качестве системы отсчета нужно выбрать второй автомобиль. Так как система отсчета, связанная со вторым автомобилем, и первый автомобиль движутся в одном направлении, классический закон сложения скоростей в скалярном виде будет выглядеть так:
Отсюда скорость первого автомобиля в системе отсчёта, связанной со вторым автомобилем:
По условию задачи ответом должен быть модуль этой скорости. Модуль числа 50 есть 50.Ответ: 50
pазбирался: Алиса Никитина | обсудить разбор | оценить
Источник


