Как перестать действовать автоматически, как робот

Наша среда, воспитание и средства массовой информации, наши убеждения, мысли, идеи и поведение. Мы живём и действуем в соответствии с этой программой, и ищем компанию людей, которые думают и действуют так, как мы.
Это заставляет нас думать и действовать автоматически, иногда, в некоторой степени, как роботы.
Большинство людей следуют традициям и убеждениям, в которых они росли, и редко идут по новому пути. Они любят быть частью группы, поскольку это даёт им чувство безопасности и принадлежности. Это же желание подталкивает людей к тому, чтобы стать фанатами некоторых футбольных или баскетбольных команд, восхищаться определенным певцом, присоединиться к определенной политической партии или стать членами социальной группы.
В наши дни эта тенденция даже усилилась благодаря различным социальным сетям. Люди строят группы или объединяют группы с общей целью или общими убеждениями.
В этом процессе люди могут потерять свою индивидуальность и уникальность, поскольку они хотят быть частью группы и быть любимыми ею. Они не хотят быть разными и, следовательно, избегают быть оригинальными, потому что быть оригинальным значит быть другим. С этой целью они соответствуют идеям группы, думают и действуют в соответствии с идеями и убеждениями группы.
Такое поведение означает меньшую свободу, более неограниченное мышление и идти по тому же пути, что и другие. Это означает, что вы делаете всё автоматически и не задумываясь, как робот.
Вы можете перестать действовать как робот. Вы можете прекратить действовать автоматически и следовать мнениям и убеждениям других людей, не останавливаясь, чтобы подумать, если вы поступаете правильно. Когда вы прекращаете действовать таким образом, вы начинаете принимать свои собственные решения и следовать тому, что считаете нужным и правильным для вас.
Проложите свой собственный путь, вместо того, чтобы ходить по дорожкам, сделанным другими. Правда в том, что иногда разумно идти по пути, подделанному другими, но не всегда.
Когда вы перестаете действовать как робот, вы видите жизнь с более широкой, неограниченной перспективной. Это поможет вам увидеть жизнь так, какая она есть на самом деле, распознать возможности и узнать, по какой путь следовать, и чего следует избегать.
Вы становитесь мудрее, более терпимой и более внимательной, когда перестаёте действовать как робот. Вы учитесь держать открытый разум без страха и предрассудков и не ограничивая свой ум. Когда вы не ограничиваете своё мышление, не боитесь задавать вопросы и не боитесь ответов, которые вы можете получить, вы расширяете своё осознание и становитесь более сознательным существом.
Автоматические, импульсивные действия и реакции часто приводят к неприятностям, недоразумениям, ссорам и сожалениям. Когда вы пытаетесь лучше осознавать, что вы делаете, и контролируете свои действия и реакции, становится легче остановить необдуманные и импульсивные поступки, следовательно, остановите автоматическое и иррациональное поведение.
Как прекратить действовать автоматически, как робот
1. Действуйте с разумом и здравым смыслом. Это приведёт к контролю и здравомыслию в вашей жизни и поможет вам избежать действий, о которых вы позже пожалеете. Подумайте ещё раз, прежде чем действовать, и постарайтесь понять, к чему приведут ваши действия и реакции.
2. Останавливаясь, чтобы действовать как робот, даст вам больше контроля над вашей жизнью и знаниями о том, куда каждое действие приведёт вас. Вы перестали бы действовать и автоматически следили за программированием своего ума и мнениями других людей.
3. Не бойтесь думать и действовать иначе, чем другие. Вам не обязательно быть похожими на других людей. Это нормально думать, чувствовать и действовать по-другому. Вы можете стать лидером, за которым следуют другие, вместо того, чтобы быть последователем.
4. Когда вы перестаете действовать, как робот, вы преодолеваете необходимость принадлежать к группе и действуете, думайте и следуйте по своему пути. Вы становитесь свободной и независимой.
5. Посмотрите на группу маленьких рыб в воде или на стаю птиц. Они движутся вместе, как одно тело, сперва движутся в одном направлении, а затем в другом, всегда как одно тело, как будто они имеют один разум. Вам не нужно действовать так. Вы можете быть оригинальной и уникальной и иметь свои собственные мнения и свои собственные амбиции и цели. Люди, которые преуспевают в жизни, — это те люди, которые не боятся думать иначе и делать то, что раньше никогда не делали другие люди.
6. Просыпайтесь и осознавайте свой потенциал, уникальность и силу. Вы можете расширить свое понимание, лучше понять людей и лучше понять жизнь, когда перестаёте думать и действовать как робот, не принимайте взгляды и убеждения других людей и не делаете то, что делают другие люди. Когда это произойдёт, вы перестанете действовать как робот и начнете больше контролировать свою жизнь.
7. Существуют различные действия, которые могут помочь вам прекратить действовать и вести себя как робот. Эти действия помогут вам стать более сознательным существом с полным контролем над вашей жизнью и вашими действиями. Эти действия — это визуализация, обучение управлению и сосредоточению вашего ума и медитация.
Чтобы перестать действовать как робот, вам нужно смелость, сила воли и самодисциплина, но эти навыки не так сложно развивать, как думают некоторые люди.
Дзен рассказы, читать на дзене истории из жизни, реальные случаи из жизни людей в бане. Деревенские смешные случаи читаем Яндекс. Трогательные до слёз откровения. Истории измен, о любви, предательстве. Свёкр и сноха. Тёща. Астрология. Гороскоп. Снегурочка. Новый год. Снохачество. Бабушка и внучка. Жена и муж. Измена. Здесь можете читать онлайн бесплатно.
Источник
Что значит, если человек ходит как робот?
У моего бывшего мужчины походка как робота в буквальном смысле. А когда пьяный, вообще тушите свет! Мать моя вообще от него в шоке была! Она считает , что это связано после травмы головы, в связи с которой он получил инвалидность, и поэтому у него нарушена координация. Хотя он мне доказывал, что у него артроз, и поэтому он хромает. Но я думаю он врет про артроз. Права ли мама?
![]()
Такая походка является симптомом поражения подкорковых образований головного мозга. Еще, называют симптомом зубчатого колеса. Выражение лица может напоминать маску. Не исключено, что присутствует и тремор рук. Плавные движения в локтевых суставах тоже могут быть нарушены. Возможны самопроизвольные резкие движения тела, конечностей. Это, может быть и последствием черепно-мозговой травмы с кровоизлияниями в подкорковых структурах мозга. Алкоголь усугубляет эти проявления. Может быть начальным проявлением других отдельных неврологических заболеваний, связанных я ядрами подкорки и экстрапирамидной системы, проявление паркинсонизма.
![]()
Да у меня и домработницы никогда не было, что уж робот, но в далеком будущем может бы и хотела,чтоб этот чудачок принес,помыл, постирал, кушать приготовил, поубирал, погладил и спать уложил:)) А вообще пока справляюсь с работой по дому сама:))
![]()
любые движения могут быть
1) полезны, 2) вредны, 3) бесполезны и безвредны.
Неважно, что? делает человек. Важно — как?
Это как? — заключается в субъективном самоощущении самого человека.
Те. если танцору его образ нравится, ему комфортно в нем, движения доставляют радость, то
все это идет на пользу.
Если танцор не принимает танец, движения ему неприятны, то это вредит ему.
Если движения механичны и безэмоциональны, то это 3-й пункт, ни то, ни сё.
Не имеет значения, в стиле робота движения или нет, какая пластика и хореография и проч. детали и частности.
Важно, что сам танцор этого хотел, чтоб ему это нравилось и чтоб шло легко,
как бы само собой. Насилие над собой до добра не доведет.
![]()
Количество шарниров, при котором каждое движение независимо называется степенью свободы..
На ноге у человека (не считая пальцев ног) 3 сустава, на руке также 3 сустава (без пальцев рук).. Плюс вращение в пояснице..
Итого для простейшей имитации человеческого движения нужно минимально (3+3)*2+1=13 степеней свободы и при этом с разным количеством связей, например в локте есть одно движение: сгибание-разгибание, а вот плечо — может вращаться вокруг трёх осей..
Так для движения вокруг одной оси нужен один привод, а вокруг трёх осей — три привода..
Значит нужно всего (1+1+3)*2+(3+3+1)*2+3=10+14+3=27..
Для простейшей имитации нужно 27 привода..
Каждый привод должен иметь три контура регулирования — по моменту, скорости и по положению..
В каждом контуре для оптимизации характеристик нужен настроенный регулятор, который выполняется либо аппаратным, либо программным путём..
Значит нужно 81 регулятор и 81 контура регулирования и 27 датчика скорости, 27 датчика тока (момента) и 27 датчика положения.. Кроме того нужен гироскоп для задания начальной точки положения тела робота-андроида..
В теории механизмов и машин и робототехнике есть прямая и обратные задачи определения положения элемента по движению шарниров и заданное движение шарниров для определённого положения элемента, решение находится решением М-мерных матриц..
Но можно проще — запрограммировать общее движение робота с помощью движений человека, на каждый сустав которого крепят датчики положения и записывают движение каждого сустава при выполнении конкретного действия, например ходьбы.. Так программируют, например роботы-манипуляторы..
Вот так, коротенько и оооочень примитивно..
![]()
Боевой робот, официально именуемый как «Универсальный, дистанционно управляемый автономный боевой модуль Вихрь» — самый тяжелый из всех, существующих в Российской Армии. Другое наименование — «Удар». Аппарат массой 14,7 т выпускается на базе БМП-3. Другой вариант компоновки — шасси бронированного автомобиля «Тигр».
Впервые боевой робот такой конструкции был показан в 2015 г. как ударно-разведывательная машина. Сейчас производителем согласуется с Министерством обороны России техническое задание на боевые модули в модификациях инженерной, транспортной и санитарной боевой, дистанционно управляемой машины.
Управляется робот дистанционным экипажем, состоящем из двух человек. Дальность автономного действия достигает 10 км.
Робот АБМ-БСМ30 «Вихрь» вооружен 30-и миллиметровой пушкой 2А72 с боекомплектом из 50 снарядов, спаренным с пушкой пулемета ПКТМ калибром 7,62 мм с запасом патронов 2000 шт, противотанковым ракетным комплексом (ПТРК) «Корнет-М» с боекомплектом, состоящим из 6 ракет.
Полезная массовая нагрузка робота — 4 т.
![]()
Действительно, в Австралии создали такого робота, который строит дома в среднем за 2 дня.
Робот имеет 30-ти метровую руку, которой он и управляет.
Видео этого робота и его работа представлена уже на сайте ютюб.
Вот такая быстрая и точная кладка из кирпичей.
Источник
Как создаются роботы, способные пройти там же, где и мы
Чтобы приносить пользу людям, роботам нужно научиться ходить так же, как мы

Роботы уже много десятилетий умеют ходить на двух ногах. Сегодня наиболее передовые гуманоидные роботы могут шагать по плоским и наклонным поверхностям, подниматься и спускаться по ступеням и пробираться по пересечённой местности. Некоторые даже умеют прыгать. Но, несмотря на этот прогресс, роботы с ногами до сих пор не могут сравниться по ловкости, эффективности и надёжности с людьми и животными.
Существующие шагающие роботы жрут энергию и слишком много времени тратят на тренировки. Слишком часто они отказывают и ломаются. Чтобы стать роботизированными помощниками, о которых мы так давно мечтали, эти машинам придётся научиться ходить так, как мы.
Нам обязательно нужно создать роботов с ногами, поскольку наш мир предназначен для ног. Мы проходим через узкие места, мы обходим препятствия, мы поднимаемся и спускаемся по ступенькам. Роботам на колёсах или гусеницах тяжело передвигаться в тех местах, которые мы приспособили для наших тел.
И у многих гуманоидных роботов действительно есть ноги, выглядящие так же, как наши – с бёдрами, коленями, лодыжками и ступнями. Но на этом всё сходство заканчивается. Если, к примеру, сравнить силу, с которой робот давит на землю, с такой же у человека, выяснится, что часто они сильно отличаются. Большая часть гуманоидных роботов, происходящих от ранних примеров промышленных роботизированных захватов, контролируют конечности так, чтобы они точно двигались по заданным траекториям. Однако передвижение на двух ногах требует не столько контроля положения, сколько контроля силы, и подразумевает большой диапазон гибкости и эластичности – известной в робототехнике, как податливость [compliance] – позволяющий справляться с неожиданными контактами.
Многие исследовательские группы пытаются создавать менее жёстких роботов, способных двигаться более динамичным, человекоподобным образом. Наиболее известным среди таких проектов, наверное, будет Atlas от Boston Dynamics, гуманоид, способный бегать по жёсткой и мягкой почве, перепрыгивать через брёвна и даже делать сальто назад. Но опять-таки, сравнивая движение самых сложных роботов с животными, мы видим, что машины не дотягивают.
Чего же нам недостаёт? Технология – не самая большая проблема: моторы достаточно мощные, материалы достаточно прочные, компьютеры достаточно быстрые. Ограничением, видимо, служит наше понимание того, как работает ходьба.
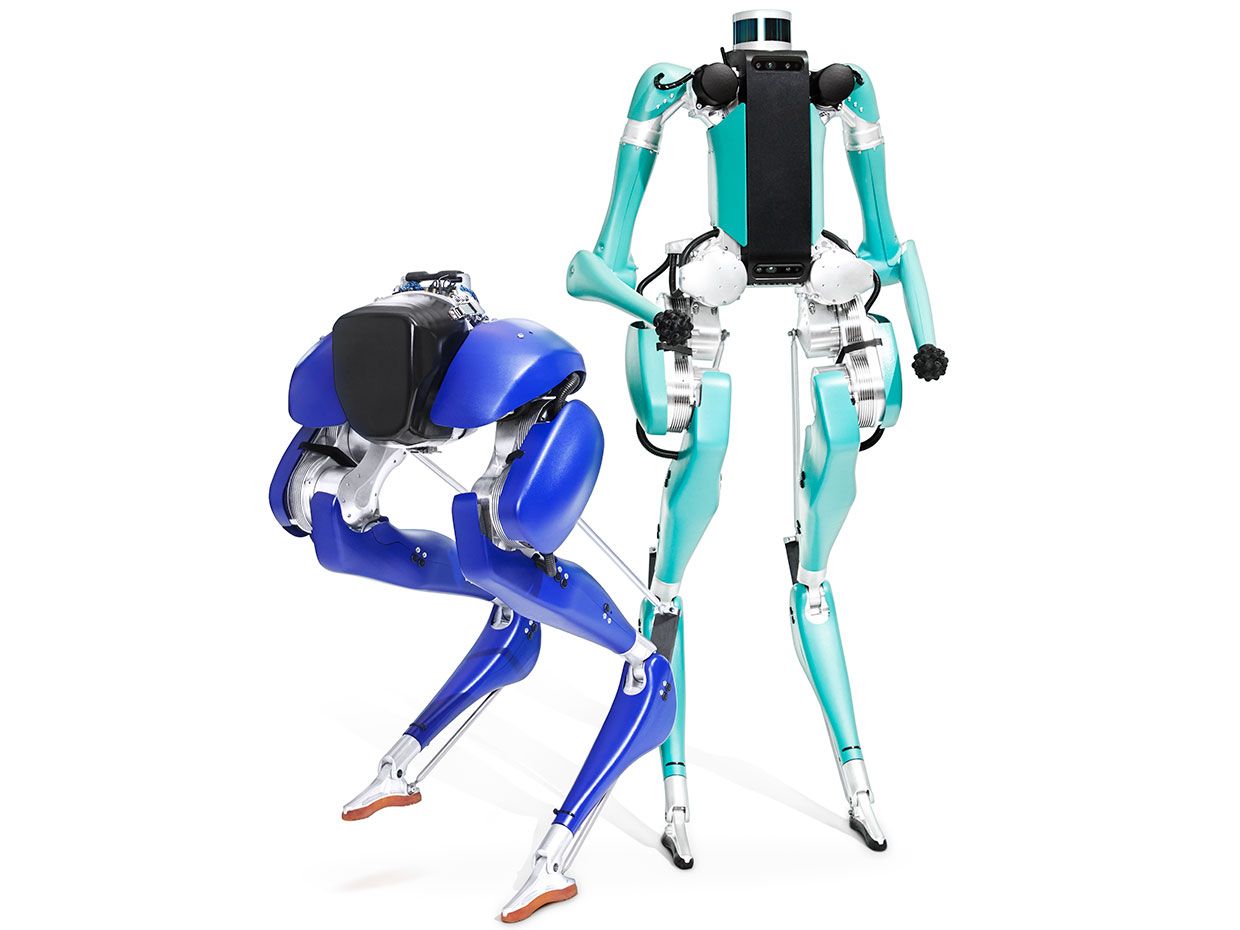
Роботы Кэсси (слева) и Диджит от Agility Robotics
В Лаборатории динамической робототехники при Орегонском университете я руководил группой исследователей, пытавшихся разобраться в базовых принципах ходьбы и применить эти открытия к роботам. Я также сооснователь и технологический директор компании Agility Robotics, стартапа, находящегося в Олбани (Орегон), изучающего вопросы коммерческого использования ходящих роботов. В 2017 году мы открыли миру Кэсси, двуногую платформу, которую мы продали нескольким исследовательским группам. Вскоре наш новый робот сможет выйти в мир: у Диджита ноги похожи на ноги Кэсси, однако у него есть датчики и пара рук, которую он использует для стабилизации, а в будущем – и для манипуляций.
Как в лаборатории, так и в компании, мы работаем над созданием будущего, в котором роботы смогут пройти везде, где могут люди. Я считаю, что роботы с динамическими ногами когда-нибудь смогут помогать ухаживать за престарелыми людьми у них дома, участвовать в спасательных операциях при пожарах и землетрясениях, и доставлять посылки на дом. Роботы с ногами также позволят создать экзоскелеты и протезы, которые помогут увеличить мобильность людей с ограниченными возможностями. Они, наконец, привнесут в реальность роботов из научной фантастики.
Некоторые птицы бегают лучше, чем летают, или даже вообще не летают. Страусы, индейки, цесарки и перепела не могут парить, как ястреб, но быстро передвигаются пешком. Мы с коллегами из лаборатории и с Моникой Дэйли из Королевского ветеринарного колледжа при Лондонском университете провели бесчисленные часы за наблюдением шагающих и бегающих по лаборатории птиц. Мы хотим понять, как эти животные способны двигаться так проворно и эффективно – и ведь большая часть этих пернатых машин работает на семенах!
В одном эксперименте цесарка бежит по дорожке, а потом наступает на яму, замаскированную кусочком салфетки. Животное не знало, что наступит в яму глубиной примерно в половину длины ноги, однако оно не споткнулось, а его нога вытянулась и приспособилась к углублению на бегу. В данном процессе происходит нечто примечательное: мозгу птицы не нужно чувствовать и реагировать на возмущение, поскольку её ноги справляются с этим сами.
Это даёт важную идею для разработчиков роботов: если вы сначала создадите робота, а потом решите запрограммировать его на ловкие движения, у вас ничего не получится. Как в случае с цесаркой, ловкость робота по большей части будет происходить от механических свойств его тела, от того, что робототехники называют пассивной динамикой. И ею пренебрегают в большинстве проектов по разработке роботов с ногами. Тщательно разрабатывая пассивную динамику робота параллельно с программной начинкой, сводя их в интегрированную систему, вы увеличиваете шансы на появление робота, приближающегося по характеристикам к животному.
Стоит отметить, что, хотя мы и черпаем вдохновение у животных, мы не воспроизводим форму стопы птицы или конструкцию мускулов и костей в ноге человека. Мы хотим понять физику движения животных и вывести из неё абстрактную математическую модель, которую можно понять, проверить в компьютерных симуляциях, и воплотить в реальных роботах. Поскольку при создании роботов мы используем металл и электронику вместо костей и мозгов, они могут сильно отличаться от животного, используя при этом такую же физику.
Одна из простейших математических моделей описывает точечную массу (туловище), соединённую с парой идеальных пружин (ноги). Эта модель пружина-масса, конечно, упрощённая; она напоминает человечка из чёрточек и не учитывает наличие у ног суставов, или то, что ступни не касаются земли в изолированных точках. И всё же модель пружина-масса может выдавать неожиданные результаты. В симуляциях она может воспроизвести почти все походки, которые используют люди и животные для шага и бега.

Первые шаги: ноги робота ATRIAS не похожи на человеческие, но он был первой машиной, демонстрировавшей походку, похожую на человеческую
Для проверки модели пружина-масса мы разработали двуногого робота ATRIAS, чьё имя является акронимом нашего основного предположения: Assume The Robot Is A Sphere [представим, что робот – это сфера]. Идея была в том, что пассивная динамика робота может как можно точнее воссоздавать модель точечной массы с пружинными ногами.
Каждая нога делается из лёгких углеволоконных стержней, собранных в параллелограмм, известный, как шарнирный четырёхзвенник. Подобная структура минимизирует массу ног и их инерцию, приближая систему к модели пружина-масса. Верхнюю часть ног мы оборудовали фиберглассовыми пружинами, физически реализующими «пружину» модели, обрабатывающими соударения с землёй и хранящими механическую энергию.
Сначала ATRIAS едва мог стоять, и мы поддерживали его при помощи верхней привязи. Но мы совершенствовали контроллер, отслеживающий скорость и наклон тела, и робот сначала начал делать первые шаги, а потом свободно ходить по лаборатории. Затем ATRIAS научился восстанавливаться после возмущений – в одном из экспериментов мои студенты швырялись в него мячами. Ещё мы отвезли ATRIAS на университетское футбольное поле, ускорили его до максимальной скорости в 7,6 км/ч, и затем быстро остановили.
Чтобы лучше понять, что делал робот, представьте, что вам завязали глаза, вы ходите на ходулях, а ваше туловище завёрнуто в ковёр, и вы не можете использовать руки для балансировки. Вы можете только шагать дальше – это и делал ATRIAS. Он даже мог справляться с препятствиями, например, с кучей дров на пути.
И, хотя ловкость была важной составляющей, также было очень важно экономично расходовать энергию. Мы подтвердили экономичность робота, измерив параметр, известный, как стоимость перемещения [cost of transport, COT]. Он определяется, как отношение энергопотребления (мощности) к произведению веса на скорость, и используется для сравнения энергоэффективности перемещения животных и машин. Чем ниже СОТ, тем лучше. У шагающего человека СОТ равен 0,2, а у обычного гуманоидного робота этот показатель гораздо больше – от 2 до 3, по некоторым прикидкам. Наши эксперименты показали, что у ATRIAS в шагающем режиме СОТ равен 1,13, что демонстрирует эффективность динамических роботов. И в самом деле, питаясь от нескольких литий-полимерных аккумуляторов – таких, что используются в машинках на радиоуправлении – ATRIAS мог бы проработать примерно час.
Мы также измерили силу, с которой робот давит на землю. Мы поставили ATRIAS весом в 72,5 кг (примерно как средний человек) на силовую платформу – этот инструмент часто используется в спортивной медицине для оценки походки человека через измерение сил реакции. При ходьбе робота мы записывали данные по силам. Затем место ATRIAS занял один из моих студентов, и мы записали его шаги. Построив график зависимости реакции опоры по времени, мы увидели, что он точно совпадает с графиком робота. Насколько нам известно, это наиболее реалистичная реализация динамики человеческой походки у роботов на сегодня.
Результаты подтвердили, что простую динамическую систему пружина-масса можно реализовать у робота. Она обладает множеством полезных свойств, таких, как эффективность, надёжность и гибкость, и добирается до сути ходьбы. Настало время создавать следующего робота.
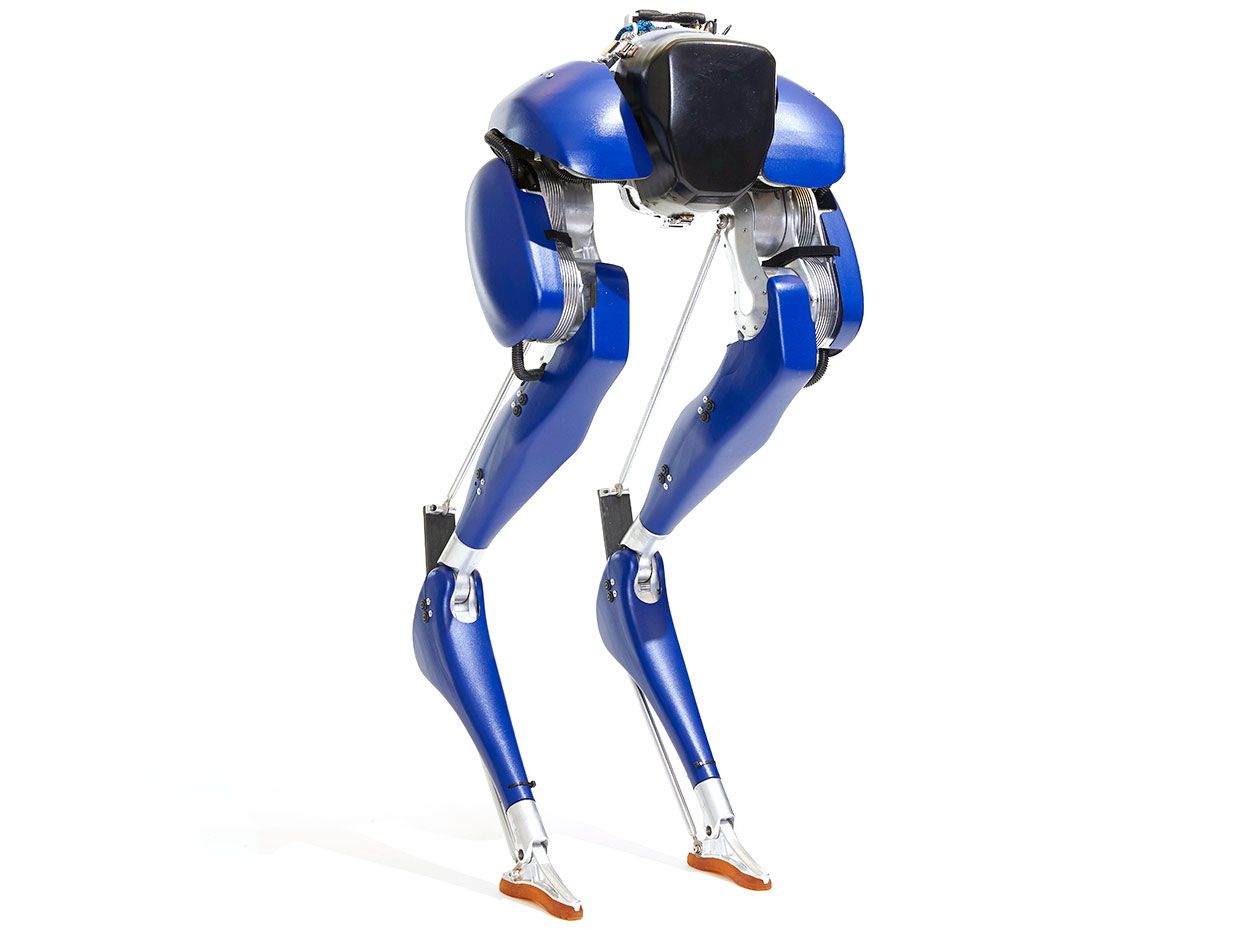
Для передвижения по сложной местности Кэсси использует пять моторов и по две пружины на каждой ноге
Кэсси, как и ATRIAS, динамический шагающий робот. Мы оптимизировали все аспекты его дизайна с тем, чтобы создать надёжного и способного робота, пригодного для коммерциализации. И мы поставили высокую планку: мы хотели, чтобы Кэсси могла бегать по лесу, ходить по пересечённой местности и работать по нескольку часов от батареи без поддерживающего подвеса.
Кэсси строится на тех же концепциях, что использовались для ATRIAS, но мы решили сделать ей совершенно новые ноги. Раньше мы использовали два мотора для питания каждого четырёхзвенника на каждой ноге. Такая схема минимизирует их массу, но есть и недостаток: во время ходьбы один мотор тормозил другой, что приводило к потерям энергии. При работе над Кэсси мы изучали другие конфигурации ног, чтобы устранить этот эффект. Новая схема позволяет сделать моторы меньше, и робот стал ещё эффективнее, чем ATRIAS.
Важно отметить, что конфигурация ног Кэсси стала результатом этого анализа. То, что нога напоминает ногу страуса или другого теропода, может говорить о том, что мы находимся на правильном пути, но мы не стремились создать робота, который после покрытия его оперением смог бы затеряться в стае эму.
У каждой ноги Кэсси есть пять осей движения – или степеней свободы, говоря по-робототехнически – и каждой управляет свой мотор. У бёдер есть три степени свободы, как у наших, что позволяет ноге поворачиваться в любом направлении. У двух других моторов оси находятся в колене и ступне. У Кэсси есть дополнительные степени свободы в голени и лодыжке; они пассивные, и не контролируются моторами, а приделаны к пружинам, что позволяет роботу двигаться по сложной местности, неподвластной плоскостопным гуманоидам.
Новые ноги Кэсси потребовали создания более сложного низкоуровневого контроллера, чем был у ATRIAS. ATRIAS вытягивал ногу, просто прикладывая равные по силе и противоположные по направлению крутящие моменты с обоих моторов. У Кэсси передвижение ноги в определённом направлении требует расчёта разных крутящих моментов для разных моторов. Для этого контроллер должен учитывать инерцию ног и динамику моторов и коробок передач.
Контролер Кэсси использует запланированные шаги и динамическую балансировку
Да, задача контроллера стала сложнее, но этот метод позволяет эффективнее ходить и использовать более широкий спектр поведения. Кэсси может идти со скоростью до 5 км/ч, используя один из первых контроллеров. Энергопотребление разнится от 100 Вт (стоя) до 300 Вт (в движении), и на литий-ионной батарее она может работать 5 часов. Также новые ноги позволяют Кэссии лавировать так, как этого не мог ATRIAS. А благодаря мотору в суставе ступни она может стоять, без необходимости постоянно двигаться, так, как это делал ATRIAS.
Также Кэсси весит всего 31 кг, в два раза меньше, чем ATRIAS. Двух Кэсси можно загрузить в багажник машины менее чем за минуту. А ещё она более надёжная: её части сделаны из алюминия и углеволокна, а защитный корпус из прочного пластика акрил-поливинилхлорида, защищает её от столкновений и падений.
Пока что Кэсси не умеет бегать по лесу. Но мы водили её на улицу, без страховки, и она ходит по земле, траве и павшим листьям. Сейчас мы изучаем вопрос интеграции динамического поведения робота с планированием движений, что позволяет ей, к примеру, подниматься по ступенькам. Мы также работаем над ещё одной возможностью, которая сделает роботов типа Кэсси более полезными: над руками.

У Диджита есть ноги, как и у Кэсси, но ещё у него есть туловище с датчиками внутри и пара рук, помогающих ему с мобильностью и балансом.
Диджит – прямой потомок Кэсси. У него похожие ноги, но мы добавили ему туловище с датчиками внутри и пару рук. Они специально сделаны для того, чтобы помогать ему с мобильностью и балансом, и качаются в соответствии с походкой. Они также позволяют Диджиту поддержать себя при падении и переиориентировать своё тело, чтобы встать.
У Диджита есть кое-что ещё, чего нет у Кэсси: встроенное восприятие. Мы добавили ему множество датчиков, включая лидар в верхней части тела. Датчики помогают ему собирать данные, что позволяет роботу передвигаться в мире, полном препятствий, например, в захламлённых комнатах и по ступеням, и полагаться на стабильную динамику только в неожиданных ситуациях и при ошибках датчиков.
Диджиту, и роботу с ногами, который появится после него, предстоит ещё многому научиться. Но мы убеждены, что они изменят мир. Их влияние может сравниться с автомобилями в плане изменения стиля жизни людей, закономерностей дорожного движения и схем городов, где эти роботы обещают преобразовать логистику и доставку посылок.
В недалёком будущем, когда появятся робомобили, у производителей автомобилей и компаний, обеспечивающих совместные поездки, типа Lyft и Uber, будут свои огромные парки из машин, перевозящих людей, и максимум трафика будет приходиться на час пик, прямо как сегодня. Но чем будут заниматься эти машины поздно ночью и в середине дня? Они могут не простаивать, а перевозить посылки из автоматических складов до вашей двери. Однако эти машины смогут доехать только до тротуара – без человека доставить посылку до двери довольно сложно. И тут вступают в дело шагающие роботы. Они будут ездить в таких автомобилях и проходить последние несколько метров. И хотя колёса и крылья могут исполнять часть этих ролей, в мире, предназначенном для двуногих, ни одна другая платформа для передвижения не будет столь гибкой, как робот на ногах.

Диджит учиться ходить по разной местности и подниматься по ступеням, чтобы однажды он смог доставлять посылки прямо до двери
Роботы-доставщики будут частью всё более автоматизируемой системы логистики, где посылки от производителя сразу доставляются до вашей двери. Эта система уменьшит стоимость доставки так, что посылки доставлять будет дешевле, чем покупать их в крупных, хорошо освещённых, подогреваемых складах с доступом человека. Мелкооптовые магазины станут ненужными. Люди, конечно, смогут наслаждаться покупками некоторых вещей. Но ежедневные продукты будут доставлять роботы, экономя вам время и деньги.
Двуногие роботы смогут проникнуть в наши дома и офисы. Они могут ходить по ступеням и в заставленных помещениях, взаимодействовать с людьми на безопасном уровне глаз и на человеческом масштабе, что позволит нам достойно стареть в наших домах. Они помогут таскать вещи и будут работать как устройства удалённого присутствия, что позволит членам семьи и друзьям использовать робота для того, чтобы общаться с людьми удалённо и составлять им компанию.
Роботы на ногах смогут пробираться туда, где людям находиться опасно. Они будут прыгать с парашютом в лесные пожары для сбора данных в реальном времени, бежать в горящие здания в поисках жителей, заходить на территорию катастроф, таких, как атомная станция Фукусима, изучая труднодоступные территории. Они будут регулярно инспектировать внутренние части гидроэлектростанций и заброшенных шахт, чтобы этого не пришлось делать нам.
Чтобы попасть в это будущее, нам нужно решить множество проблем. Но я убеждён, что сообщество робототехников может сделать эту технологию практичной. Это будет один маленький шаг для робота и огромный скачок для всего человечества.
Источник


