- 3.3.5 Идеальный блок
- 3.3.6 Связь в виде невесомого твердого стержня
- 3.3.7 Скользящая заделка
- Большая Энциклопедия Нефти и Газа
- Идеальный блок
- Простые механизмы. Блок.
- Неподвижный блок.
- Подвижный блок
- Блоки в механике
- Чем шкив отличается от блока
- Условия для вывода формул
- Пояснения к условиям
- Два вида блоков
- Неподвижный блок
- Подвижный блок
- Нужно запомнить
- Комбинации блоков
3.3.5 Идеальный блок
Рассмотрим свойства идеального блока (рис. 28). Блок может быть использован только в паре с гибкой нитью, перекинутой через него.
Нить закреплена в точке А, а в точке D к ней приложена сила Р. Когда пренебрегают трением в оси колеса блока и гибкой нити об это колесо, идеальный блок не изменяет величину натяжения нити на участках АВ и СD. Направление реакций на участках АВ и СD совпадает с направлением этих линий. Таким образом, при рассмотрении равновесия тела (шарнирной опоры А) следует мысленно отбросить блок вместе с приложенной нему силой Р при помощи рассечения нити на участке АВ, заменив механическое действие блока силой Ра, направленной вдоль участка АВ в сторону отброшенной части, по величине равной данной силе Р.
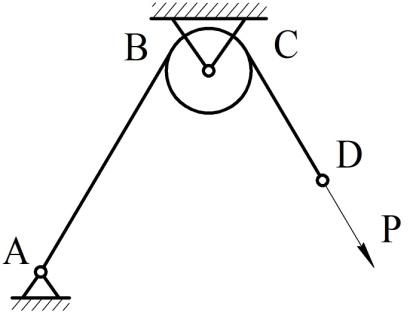

Итак: идеальный блок не изменяет величины натяжения блока, он изменяет направление передаваемого усилия (натяжения нити).
Двухсторонние связи (1 группа)
К этой группе можно отнести следующие, часто встречающиеся в практических задачах связи:
– невесомые твердые стержни;
Конструкция двухсторонних связей определяет положение линии действия реакции, а её модуль и направление вдоль линии действия остаются неизвестными. Примерами таких связей могут служить невесомые стержни в опорах или фермах (рис. 29) и скользящая заделка.

3.3.6 Связь в виде невесомого твердого стержня
Связь в виде невесомого твердого стержня шарнирно соединенного концами с данным телом, равновесие которого мы рассматриваем, и с другим каким-нибудь телом, например, со стойкой или полом. Такой стержень называется опорным, так как он испытывает нагрузку только на своих концах.
Если в пределах стержня от шарнира до шарнира никаких сил к нему не приложено (опорный стержень нельзя нагружать силами в какой-нибудь его средней части и вес стержня не учитывается), то реакция стержня направлена вдоль стержня.

Пример 2. Если связью является криволинейный невесомый стержень (рис. 31), то его реакция тоже направлена вдоль прямой АВ, соединяющей шарниры А и В. Таким образом, реакции стержневых связей направлены вдоль прямой, проходящей через оси концевых шарниров.

Для примеров 1 и 2 можно считать, что искомым здесь является лишь модуль реакции, так как знак численного значения при решении задачи покажет правильное направление реакции вдоль известной линии действия.
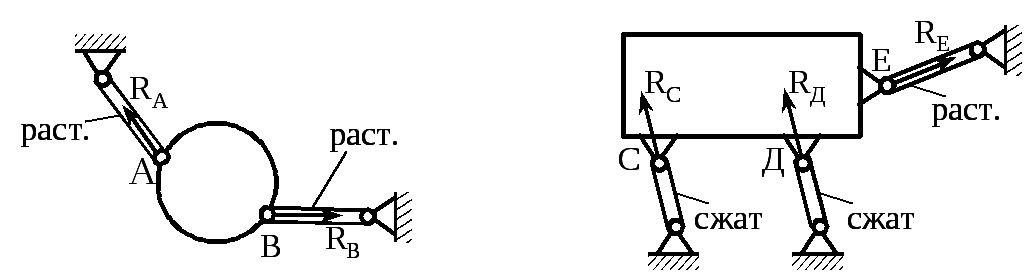
В отличие от нити стержень может действовать на тело в двух направлениях, испытывая либо сжатие, либо растяжение. Если стержень растянут, то его реакция направлена в сторону от тела к стержню (RА, RВ и RЕ на рисунке 32 а и б). Если стержень сжат, то его реакция направлена в сторону от стержня к телу (RС и, RD на рисунке 32 б).
3.3.7 Скользящая заделка
Данная связь в плоском случае разрешает движение по канавке, но запрещает движение поперёк канавки и поворот вокруг неё. На рисунке 33 показаны возникающие в этом случае реакцию связи и опорного момента.
На рисунке 34 показана двойная скользящая заделка, которая запрещает повороты – возникает момент МА, но разрешает скольжение в двух взаимно перпендикулярных направлениях – сил реакций не будет.
Источник
Большая Энциклопедия Нефти и Газа
Идеальный блок
Блок называется идеальным, если трением в шарнире можно пренебречь по сравнению с натяжениями веревок. Тогда линия действия реакции оси блока пройдет через его центр и на основании теоремы о трех силах будет направлена по биссектрисе угла между силами Q и G. Поэтому при равновесии идеальный блок изменяет направление передаваемого усилия, но сохраняет неизменной его величину. [46]
Предположим, что в точке D провод закреплен, а в наинизшей точке О перекинут через неподвижный блок и свободно свисает вниз. Будем считать провод идеальной нерастяжимой гибкой нитью, а блок, через который перекинут провод — идеальным блоком . [47]
Для оценки точности полезно ввести понятия: идеальный операционный блок и реальный операционный блок. Операционные блоки, рассмотренные в главе 2, следует отнести к идеальным. Для идеальных блоков характерен строгий математический изоморфизм между физическими процессами, протекающими в них, и математическими операциями, реализуемыми этими блоками. Идеальный блок выполняет математические операции абсолютно точно. Конечно, сконструировать и изготовить идеальный блок невозможно. Идеальный блок — это абстрактная конструкция, удобная для оценки ошибок реальных операционных блоков. Под ошибкой реального операционного блока понимают разность между выходным напряжением идеального и реального блоков. Выявление ошибок блоков требует исследования внутреннего строения реальных блоков. Глубина такого исследования может быть различной. [48]
Для оценки точности полезно ввести понятия: идеальный операционный блок и реальный операционный блок. Операционные блоки, рассмотренные в главе 2, следует отнести к идеальным. Для идеальных блоков характерен строгий математический изоморфизм между физическими процессами, протекающими в них, и математическими операциями, реализуемыми этими блоками. Идеальный блок выполняет математические операции абсолютно точно. Конечно, сконструировать и изготовить идеальный блок невозможно. Идеальный блок — это абстрактная конструкция, удобная для оценки ошибок реальных операционных блоков. Под ошибкой реального операционного блока понимают разность между выходным напряжением идеального и реального блоков. Выявление ошибок блоков требует исследования внутреннего строения реальных блоков. Глубина такого исследования может быть различной. [49]
Теорема Лагранжа — Дирихле приводит в этом случае к следующему положению: если центр масс системы тяжелых точек занимает наинизшее из возможных смежных положений, то это положение равновесия системы будет устойчивым. Заменим приложенные к системе силы натяжениями переброшенных через идеальные блоки нитей , к концам которых привешены грузы, соответственно равные по величине приложенным к системам силам. [50]
Для оценки точности полезно ввести понятия: идеальный операционный блок и реальный операционный блок. Операционные блоки, рассмотренные в главе 2, следует отнести к идеальным. Для идеальных блоков характерен строгий математический изоморфизм между физическими процессами, протекающими в них, и математическими операциями, реализуемыми этими блоками. Идеальный блок выполняет математические операции абсолютно точно. Конечно, сконструировать и изготовить идеальный блок невозможно. Идеальный блок — это абстрактная конструкция, удобная для оценки ошибок реальных операционных блоков. Под ошибкой реального операционного блока понимают разность между выходным напряжением идеального и реального блоков. Выявление ошибок блоков требует исследования внутреннего строения реальных блоков. Глубина такого исследования может быть различной. [51]
Для оценки точности полезно ввести понятия: идеальный операционный блок и реальный операционный блок. Операционные блоки, рассмотренные в главе 2, следует отнести к идеальным. Для идеальных блоков характерен строгий математический изоморфизм между физическими процессами, протекающими в них, и математическими операциями, реализуемыми этими блоками. Идеальный блок выполняет математические операции абсолютно точно. Конечно, сконструировать и изготовить идеальный блок невозможно. Идеальный блок — это абстрактная конструкция, удобная для оценки ошибок реальных операционных блоков. Под ошибкой реального операционного блока понимают разность между выходным напряжением идеального и реального блоков. Выявление ошибок блоков требует исследования внутреннего строения реальных блоков. Глубина такого исследования может быть различной. [52]
Источник
Простые механизмы. Блок.
Одним из простых механизмов является блок. Блок — это колесо с желобом, по которому пропущена веревка или трос. Используется блок, как и все простые механизмы, для преобразования силы — т.е. изменения направления и модуля приложенной силы.
Блоки бывают подвижные и неподвижные. Рассмотрим каждый случай подробно.
Неподвижный блок.
Неподвижный блок — это блок, ось которого (точка О на рисунке) закреплена, и блок при подъеме грузов не опускается и не поднимается.
Такой блок можно рассматривать как рычаг первого рода, у которого оба плеча равны между собой, и равны радиусу колеса блока:
Так как плечи рычага равны, то мы не получим выигрыша в силе. Проверим это, используя формулу равновесия рычага:
В нашем случае неподвижного блока:
Действительно, для того чтобы уравновесить силу на одном конце веревки, перекинутой через блок, нам необходимо приложить такую же силу на другом конце. Поэтому неподвижные блоки используют в том случае, если удобнее изменить направление силы, для совершения работы. Например, удобнее поднимать груз, удерживая веревку при помощи своего веса, поэтому на рисунке экспериментатор использует неподвижный блок.
Используя комбинации из неподвижных блоков можно менять направление силы как угодно:
И в этом случае, используя уже два неподвижных блока — мы не получаем выигрыша в силе, зато изменили направление приложения силы, теперь для поднятия груза силу мы должны приложить в горизонтальном направлении.
Подвижный блок
Подвижный блок — это блок, ось которого не закреплена, а поднимается вместе с грузом. Изобразим подвижный блок находящийся в равновесии, отметим на рисунке силы, действующие на систему, а также плечи приложения этих сил:
Подвижный блок можно сравнить с рычагом второго рода. Действительно: точка опоры О лежит по одну сторону от точки приложения сил, отрезок ОА — плечо силы P
Источник
Блоки в механике
Простыми словами: блок – это колесо, на окружности которого есть желобок. Колесо может вращаться вокруг своей оси, а в желоб можно проложить ремень, или веревку.
Например, велосипедное колесо можно считать блоком, если с него снять резиновую шину и вместо нее проложить в желоб веревку, канат и т. п. К одному концу веревки можно прикрепить груз, а за второй конец – тянуть, то есть, прикладывать к нему силу.
Если вместо веревки желают использовать цепь, то вместо колеса с желобом часто используют колесо с выступающими зубцами. Это исключает проскальзывание цепи и увеличивает сцепление. Такие конструкции называют звездочками. К примеру, велосипед содержит две звезды – одну ведущую, на оси с педалями, вторую – ведомую, на оси заднего колеса.
Блоки применяют в различных механизмах, например, для подъема грузов.
Чем шкив отличается от блока
Есть разница между шкивом и блоком при их внешнем сходстве.
Шкив — соединяется с осью жестко, он будет передавать вращательное усилие с оси на ремень, или с ремня на ось.
Блок — свободно вращается на оси, с оси на ремень или с ремня на ось вращательное усилие не передаёт.
Условия для вывода формул
Упростим задачу получения формул для блоков. Будем считать блок идеальным.
Пусть для этого выполняются некоторые условия:
- считаем, блок невесомым, то есть, у него нет массы,
- считаем, что блок абсолютно жесткий, то есть, нет его деформации,
- при вращении блока трение отсутствует.
Пояснения к условиям
Эти три условия нужны для того, чтобы наши усилия затрачивались только на перемещение полезного груза, и не затрачивались на вращение блока. Груз мы прикрепляем к одному концу веревки, в то время, как тянем за другой ее конец.
Более строгим языком: условия должны выполняться, чтобы приложенная сила совершала лишь работу по перемещению полезного груза, а энергия на вращение блока не затрачивалась.
Честно говоря, в реальности ничего идеального не существует и все эти условия полностью соблюсти нельзя. Блоки изготавливают из прочных металлов, а они обладают массой. Трение можно только лишь уменьшить, но совсем избавиться от него не получится. Но, так как масса блока мала, по сравнению с поднимаемым грузом и трение значительно уменьшено, будем в этой статье считать блок идеальным.
Рассмотрим такие идеальные блоки.
Два вида блоков
Блоки, по их перемещению, можно разделить на два вида.
Неподвижный блок – вращается, оставаясь на месте (вращающееся колесо велосипеда, к примеру, лежащего на боку).
Подвижный блок – вращается и движется поступательно (велосипедное колесо во время поездки на велосипеде).
Примечание:
Если говорить более строгим языком, то через центр блока перпендикулярно плоскости блока проходит ось вращения. Блок называют неподвижным, если при вращении блока вокруг оси, точки, лежащие на этой оси, остаются неподвижными. Если же, точки, лежащие на оси, проходящей через центр блока, при его вращении будут двигаться поступательно — блок назовут подвижным.
Неподвижный блок
Рассмотрим блок, изображенный на рисунке 1.

Назовем красную точку на рисунке 1 кратко «точкой вращения». Блок может вращаться вокруг этой точки. При этом все точки блока будут двигаться по окружностям вокруг красной точки, а красная точка будет оставаться неподвижной.
Примечание:
Через точку, обозначенную на рисунке 1 красным цветом, проходит ось вращения блока перпендикулярно плоскости рисунка.
К левой части веревки, нарисованной черным цветом и пропущенной через желобок, приложена сила \( F_ <1>\), а к правой части веревки – сила \( F_ <2>\). Обе силы на рисунке направлены вниз.
Соединим три отмеченные точки прямой линией. На ней отметим расстояние между точкой, вокруг которой блок вращается и, точками, к которым приложены силы.

Теперь для упрощения уберем с рисунка 2 некоторые элементы, получим картину, представленную на рисунке 3. То есть, мы заменили неподвижный блок рычагом.

Определим вращательный момент каждой силы:
Подробнее о моменте силы читайте здесь (откроется в новой вкладке).
Теперь запишем условие равновесия рычага:
Пояснения к условиям равновесия рычага читайте в этой статье (откроется в новой вкладке).
И, подставив выражения для сил и их плеч, получим
\( — F_ <1>\cdot R + F_ <2>\cdot R = 0\)
\( F_ <2>\cdot R = F_ <1>\cdot R \)
Сократив обе части на \( R \), запишем для неподвижного блока следствие из условия равновесия:
Сила – это вектор, если между двумя векторами стоит знак равенства, значит, у них совпадают длина и направление.
О равенстве векторов читайте тут (откроется в новой вкладке).
Например, чтобы поднять мешок 50 килограммов без блока, нужно приложить силу примерно 500 Ньютонов. Используя неподвижный блок, мы прикладываем эту же силу, но благодаря блоку направляем ее вниз, а не наверх. Тянуть вниз удобнее, потому, что мы дополнительно прикладываем свой вес к тому концу веревки, за который тянем. Мы тянем вниз, а подвешенный мешок при этом поднимается вверх.
Важно! Неподвижный блок меняет направление вектора силы
Подвижный блок
Рассмотрим рисунок 4. На нем изображен подвижный блок. Он может вращаться вокруг точки, обозначенной на рисунке 4 красным цветом. Красную точку назовем «точкой вращения».

Проведем прямую линию через три отмеченные точки (рис. 5) и отметим на ней расстояния между точкой, вокруг которой блок вращается и, точками, к которым приложены силы.

Уберем с рисунка окружность и получим такую картину (рис. 6). Мы заменили подвижный блок рычагом. Обе точки приложения сил находятся по одну сторону от оси вращения. Подробнее о таких видах рычагов читайте по этой ссылке.

Вращательные моменты сил:
\(M_ <1>= F_ <1>\cdot 2 \cdot R\)
Теперь запишем условие равновесия рычага:
Подставляя выражения для сил и их плеч, получим
\( F_ <1>\cdot 2 \cdot R — F_ <2>\cdot R = 0\)
\( F_ <1>\cdot 2 \cdot R = F_ <2>\cdot R \)
Разделим обе части на \( R \), и получим для подвижного блока следствие из условия равновесия:
Из выражения видно, что сила, с которой нужно тянуть вверх, в два раза меньше силы, приложенной к центральной части блока.
Из рисунков 4 – 6 видно: чтобы поднять груз вверх, нужно так же, тянуть вверх.
Поднимая мешок массой 50 килограммов без блока, мы прикладываем силу примерно 500 Ньютонов. Используя подвижный блок, мы прикладываем силу 250 Ньютонов, это в 2 раза меньше, чем без блока. Направляем силу для подъема вверх, как и без блока.
Важно! Подвижный блок меняет модуль вектора силы
Способ быстро запомнить условие для подвижного блока: Вверх тянут две веревки, а вниз – одна (см. рис 4). Блок находится в равновесии, когда
Совместное усилие двух веревок, тянущих вверх = силе одной веревки, тянущей вниз
Для подвижного блока справедливо утверждение: во сколько раз выиграем в силе, во столько же раз проиграем в расстоянии. Если получаем выигрыш в силе в 2 раза, то проигрываем в расстоянии в 2 раза. Значит, чтобы поднять такой конструкцией груз на 1 метр, нужно вытянуть 2 метра веревки
Нужно запомнить
Сила – это вектор. У любого вектора две главные характеристики: длина и направление.
Подробнее о характеристиках векторов можно прочитать здесь.
Неподвижный блок – изменяет вектор силы по направлению.
Подвижный блок – изменяет вектор силы по величине (по модулю) т. е. длину вектора.
Комбинации блоков
Если подвижный и неподвижный блоки соединить так, как показано на рисунке 7, то получим устройство, которое позволяет получить выигрыш в 2 раза. На рисунке малый блок – неподвижный, большой – подвижный. Размеры блоков для такого их соединения не имеют значения.

А если соединить так, как показано на рисунке 8, получим выигрыш в силе в 3 раза. Если получаем выигрыш в силе в 3 раза, то в 3 раза проигрываем в расстоянии. Значит, чтобы поднять такой конструкцией груз на 1 метр, нужно протянуть 3 метра веревки.
Малый блок на рисунке – неподвижный, большой – подвижный. Соотношение размеров блоков для такого их соединения не будет иметь большого значения, если расстояние между блоками будет намного превышать размеры самих блоков.

Важно! Применяя любые комбинации блоков, мы не получим выигрыша в работе. Если выигрываем в силе, то во столько же раз проигрываем в расстоянии!
Источник


